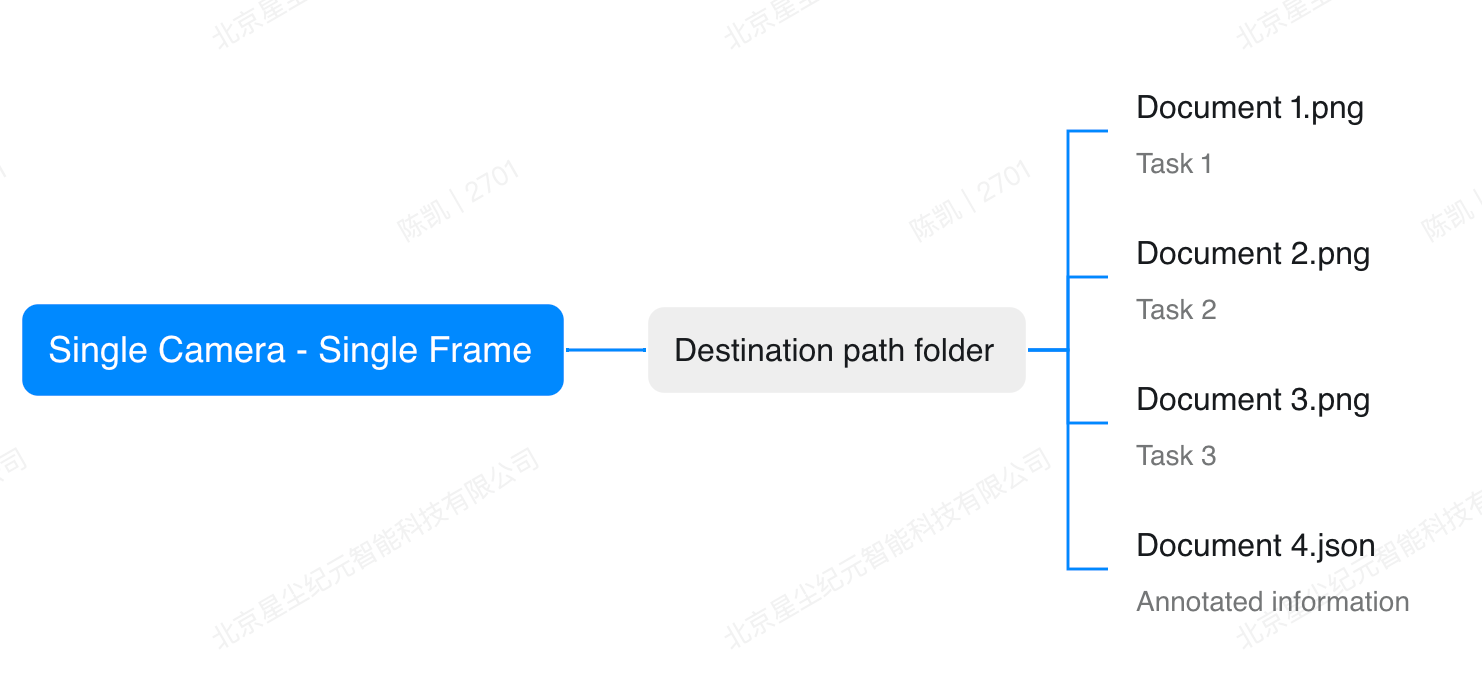
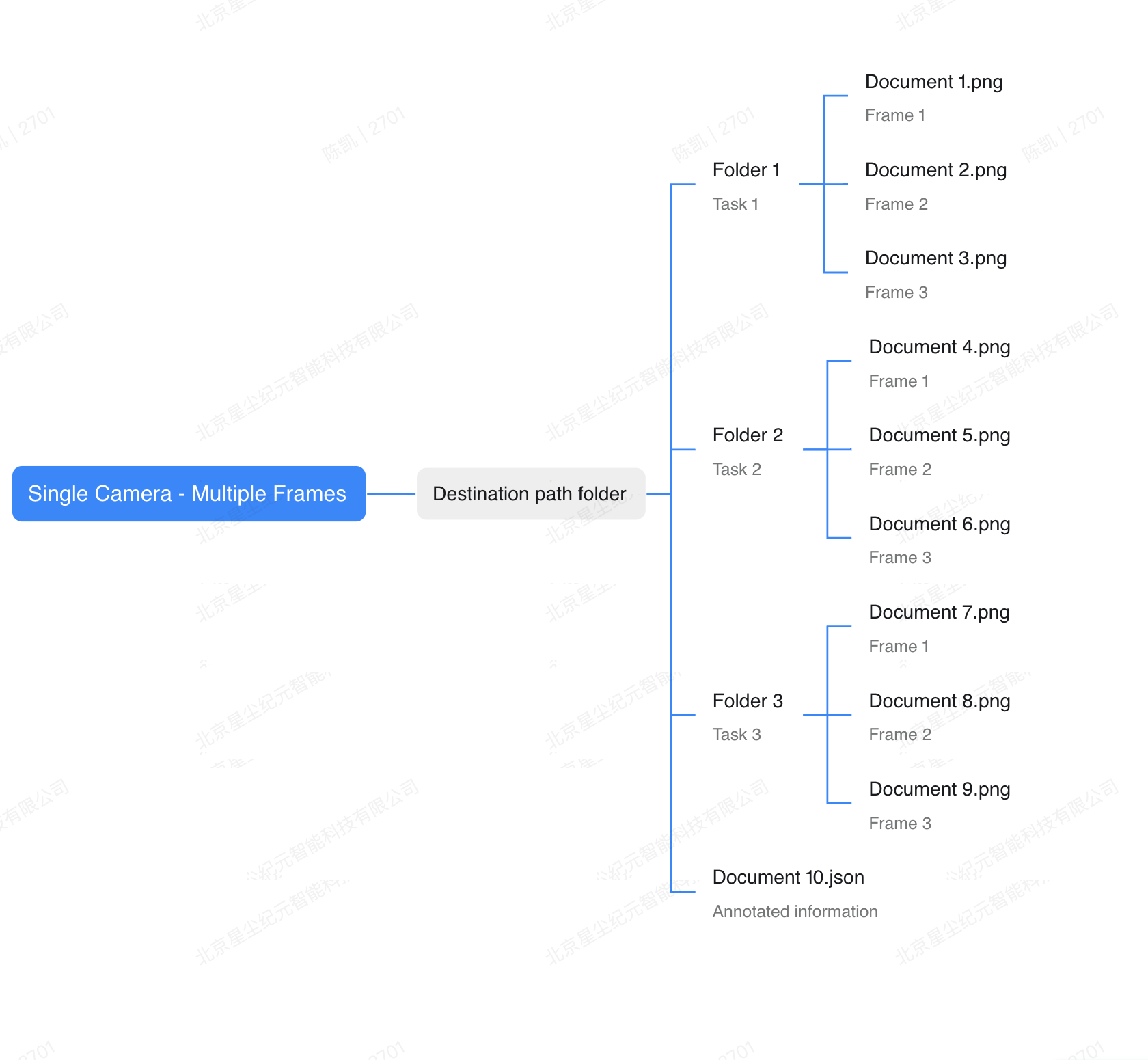
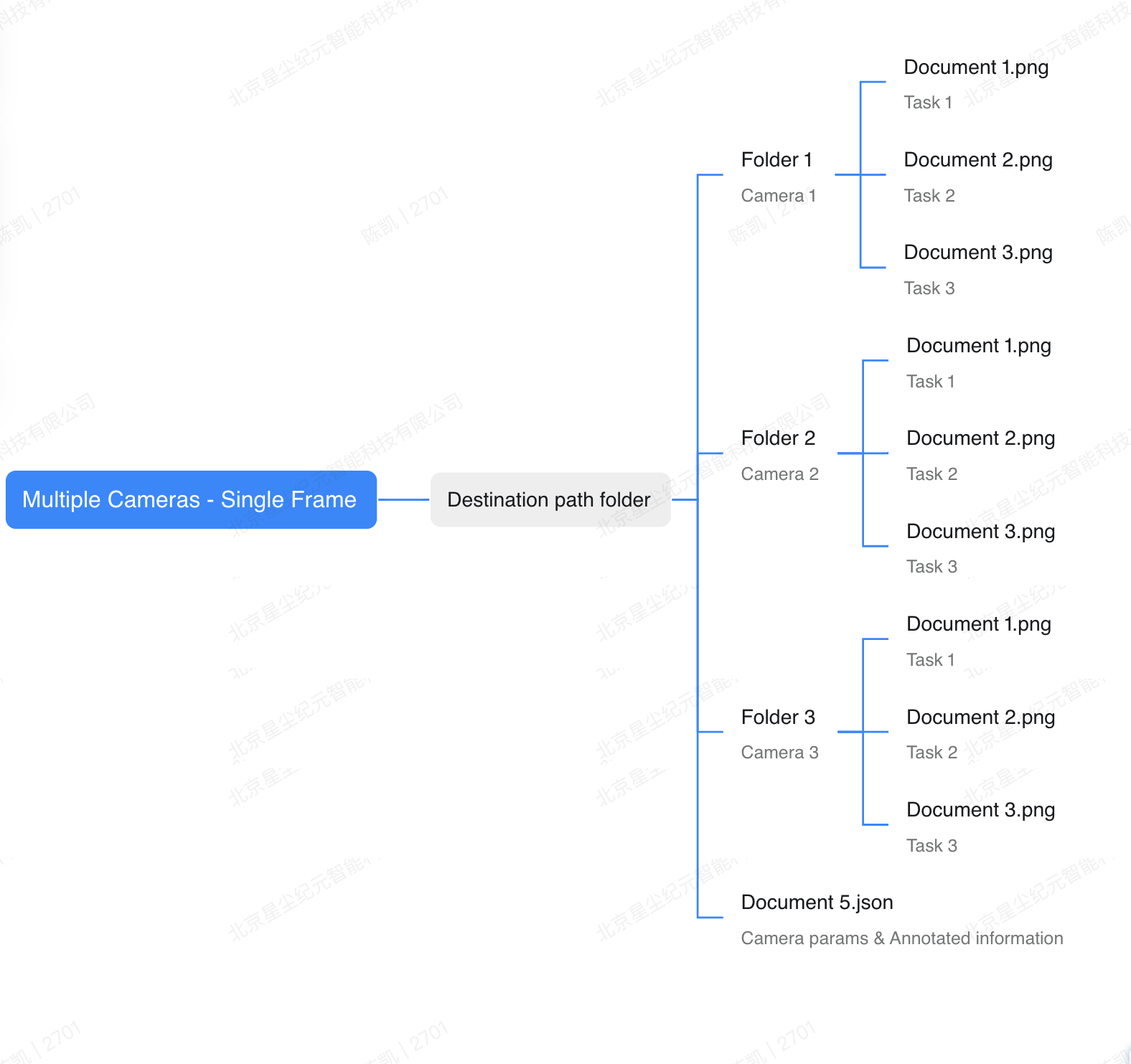
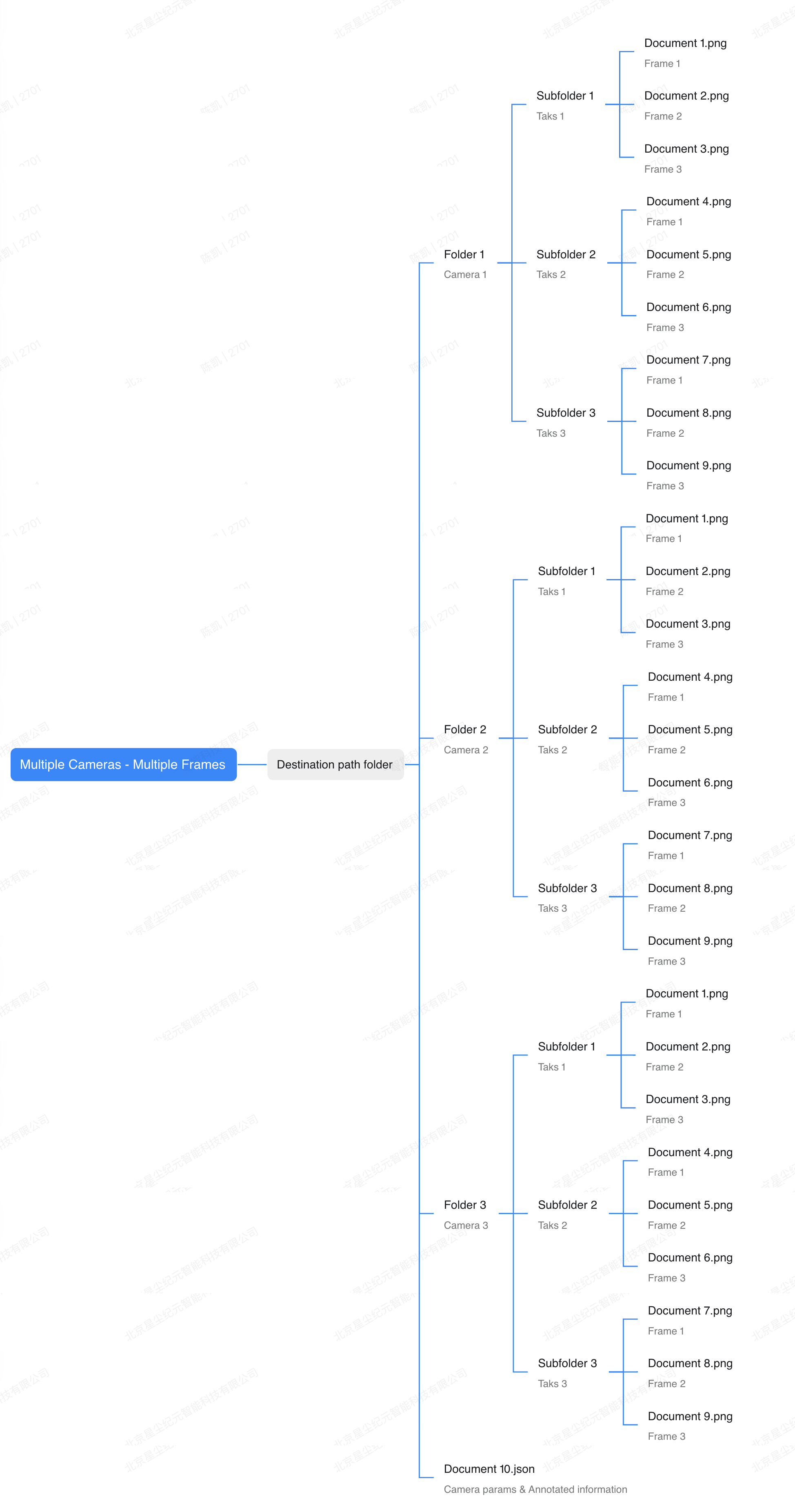
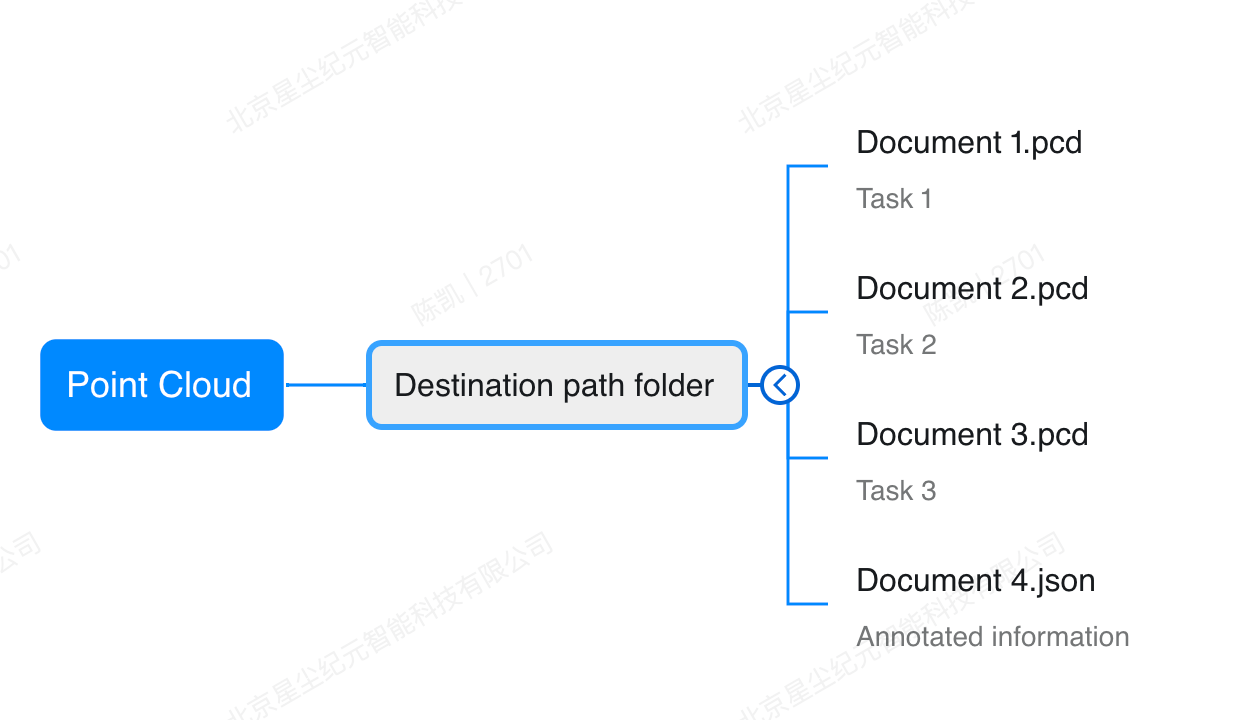
Please give the data in the following format, which will facilitate us to adapt the data at the fastest speed
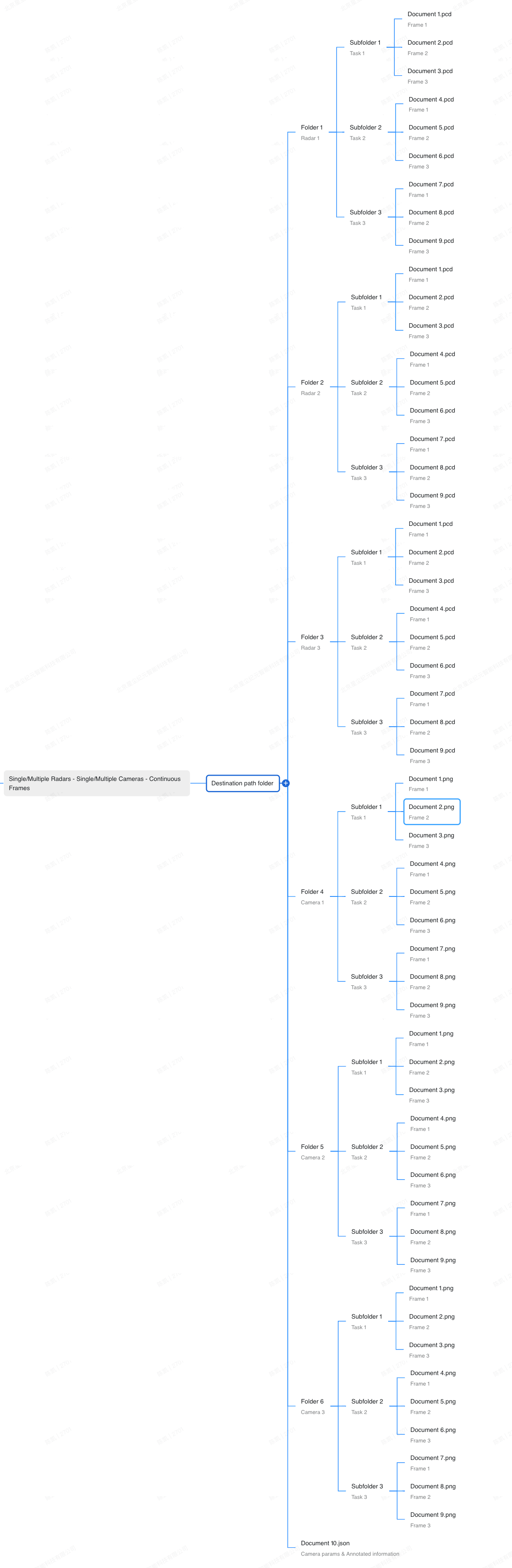
for single frame and continuous frames, .json The file is an independent parameter for each camera, and the configurable content refers to Camera parameters Partial
-data_root
-Camera1
1620724790.jpg
1620724791.jpg
...
Camera1.json
-Camera2
1620724790.jpg
1620724791.jpg
...
Camera2.json
-Camera3
1620724790.jpg
1620724791.jpg
...
Camera3.json
-Lidar
1620724790.pcd
1620724791.pcd
...
Coordinate system description: The laser radar coordinate system is used, and the forward direction of the vehicle is taken as thexthe axis's positive direction's right-handed system, if the parameter coordinate system does not correspond to it, it needs to be transformed and given to
The external parameter adopts the transformation matrix or specific parameters of the camera relative to the laser radar in the lidar coordinate system. If it is the external parameter matrix of the radar relative to the camera coordinate system, it needs to be processed by inverse transformation and then given to speed up the data adaptation. process
for corresponding camera folder namingjsonfile, The content is The detailed parameters after decomposition
| fov | number |
required | object (CameraHeading) Camera orientation, relative to the origin in the point cloud file (0, 0, 0) orientation, quaternion |
required | object (CameraIntrinsicParameter) Camera intrinsic parameters |
| matrix | Array of numbers[ items ] Bev mapping matrix |
| maxz | number |
| minz | number |
required | object (PointCloudCoordinate) Camera position, relative to the origin in the point cloud file (0, 0, 0) s position |
| projection | Array of numbers[ items ] |
required | object (CameraRadial) Camera Radial Distortion Parameters |
| skew required | number camera distortion factor |
required | object (CameraTangential) Camera Tangential Distortion Parameters |
| type required | string (CameraType) Enum: "PinHole" "Fisheye" "OmniDirectional" "Bev" Camera type |
| unProjection | Array of numbers[ items ] |
{- "type": "PinHole",
- "heading": {
- "w": 0.9998965768815161,
- "x": -0.008695232232469284,
- "y": -0.006971205169862502,
- "z": 0.009090147167644433
}, - "position": {
- "x": 0.09735360749789024,
- "y": -0.006173595037573754,
- "z": -0.474067813586117
}, - "intrinsic": {
- "fx": 8333.333333,
- "fy": 8333.33333,
- "cx": 959.5,
- "cy": 539.5
}, - "skew": 0,
- "radial": {
- "k1": 0,
- "k2": 0,
- "k3": 0,
- "k4": 0
}, - "tangential": {
- "p1": 0,
- "p2": 0
}, - "imageWidth": 1080,
- "imageHeight": 960
} required | object (PointCloudSource) Single frame point cloud data source |
| attachmentType required | string The single frame point cloud input type isPOINTCLOUD Value: "POINTCLOUD" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (PointCloudDataRecordMetadata) Point cloud annotation may be used metadata information |
{- "attachmentType": "POINTCLOUD",
- "metadata": {
- "uniqueIdentifier": "3c665b98-6594-45a7-8722-ecce0d225589"
}, - "attachment": {
- "coordinate": {
- "camera_height": 2
}, - "scopeLimit": [
- {
- "radius": 100,
- "type": "circle"
}
], - "imageSources": [
- {
- "name": "front_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": 0.9998965768815161,
- "x": -0.008695232232469284,
- "y": -0.006971205169862502,
- "z": 0.009090147167644433
}, - "position": {
- "x": 0.09735360749789024,
- "y": -0.006173595037573754,
- "z": -0.474067813586117
}, - "intrinsic": {
- "fx": 8333.333333,
- "fy": 8333.33333,
- "cx": 959.5,
- "cy": 539.5
}, - "skew": 0,
- "radial": {
- "k1": 0,
- "k2": 0,
- "k3": 0,
- "k4": 0
}, - "tangential": {
- "p1": 0,
- "p2": 0
}
}
}, - {
- "name": "back_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": 0.9998965768815161,
- "x": -0.008695232232469284,
- "y": -0.006971205169862502,
- "z": 0.009090147167644433
}, - "position": {
- "x": 0.09735360749789024,
- "y": -0.006173595037573754,
- "z": -0.474067813586117
}, - "intrinsic": {
- "fx": 8333.333333,
- "fy": 8333.33333,
- "cx": 959.5,
- "cy": 539.5
}, - "skew": 0,
- "radial": {
- "k1": 0,
- "k2": 0,
- "k3": 0,
- "k4": 0
}, - "tangential": {
- "p1": 0,
- "p2": 0
}
}
}
]
}
} required | Array of objects (PointCloudSource) [ items ] point cloud sequence data source |
| attachmentType required | string The point cloud sequence input type isPOINTCLOUD_SEQUENCE Value: "POINTCLOUD_SEQUENCE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (PointCloudDataRecordMetadata) Point cloud annotation may be used metadata information |
{- "attachmentType": "POINTCLOUD_SEQUENCE",
- "metadata": {
- "uniqueIdentifier": "3c665b98-6594-45a7-8722-ecce0d225589"
}, - "attachment": [
- {
- "coordinate": {
- "camera_height": 2
}, - "scopeLimit": [
- {
- "radius": 100,
- "type": "circle"
}
], - "imageSources": [
- {
- "name": "front_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": 0.9998965768815161,
- "x": -0.008695232232469284,
- "y": -0.006971205169862502,
- "z": 0.009090147167644433
}, - "position": {
- "x": 0.09735360749789024,
- "y": -0.006173595037573754,
- "z": -0.474067813586117
}, - "intrinsic": {
- "fx": 8333.333333,
- "fy": 8333.33333,
- "cx": 959.5,
- "cy": 539.5
}, - "skew": 0,
- "radial": {
- "k1": 0,
- "k2": 0,
- "k3": 0
}, - "tangential": {
- "p1": 0,
- "p2": 0
}
}
}, - {
- "name": "back_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": -0.469990267059842,
- "x": 0.5172219537574251,
- "y": 0.5271245940295847,
- "z": -0.4834565769430754
}, - "position": {
- "x": -0.2117782455635122,
- "y": 0.007687532381660913,
- "z": -0.1444383493927902
}, - "intrinsic": {
- "fx": 2028.8960860456893,
- "fy": 2021.943976185738,
- "cx": 975.0867262748408,
- "cy": 542.1191224289227
}, - "skew": 0,
- "radial": {
- "k1": -0.3800943983127283,
- "k2": 0.1714931036510359,
- "k3": -0.001999524932595834
}, - "tangential": {
- "p1": 0.0005520383017090625,
- "p2": 0
}
}
}
]
}, - {
- "coordinate": {
- "camera_height": 2
}, - "scopeLimit": [
- {
- "radius": 100,
- "type": "circle"
}
], - "imageSources": [
- {
- "name": "front_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": 0.9998965768815161,
- "x": -0.008695232232469284,
- "y": -0.006971205169862502,
- "z": 0.009090147167644433
}, - "position": {
- "x": 0.09735360749789024,
- "y": -0.006173595037573754,
- "z": -0.474067813586117
}, - "intrinsic": {
- "fx": 8333.333333,
- "fy": 8333.33333,
- "cx": 959.5,
- "cy": 539.5
}, - "skew": 0,
- "radial": {
- "k1": 0,
- "k2": 0,
- "k3": 0
}, - "tangential": {
- "p1": 0,
- "p2": 0
}
}
}, - {
- "name": "back_camera",
- "width": 1920,
- "height": 1080,
- "camera": {
- "type": "PinHole",
- "heading": {
- "w": -0.469990267059842,
- "x": 0.5172219537574251,
- "y": 0.5271245940295847,
- "z": -0.4834565769430754
}, - "position": {
- "x": -0.2117782455635122,
- "y": 0.007687532381660913,
- "z": -0.1444383493927902
}, - "intrinsic": {
- "fx": 2028.8960860456893,
- "fy": 2021.943976185738,
- "cx": 975.0867262748408,
- "cy": 542.1191224289227
}, - "skew": 0,
- "radial": {
- "k1": -0.3800943983127283,
- "k2": 0.1714931036510359,
- "k3": -0.001999524932595834
}, - "tangential": {
- "p1": 0.0005520383017090625,
- "p2": 0
}
}
}
]
}
]
} required | string or ImageSourceEntity (object) or Array of ImageSourceEntity (objects) (ImageSource) Single frame picture input data link |
| attachmentType required | string Single frame picture input type isIMAGE Value: "IMAGE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (ImageDataRecordMetadata) Image annotation may be used metadata information |
{- "attachmentType": "IMAGE",
- "metadata": {
- "uniqueIdentifier": "9ba65dab-4614-4601-8df1-2885178862be",
- "size": {
- "width": 1800,
- "height": 740
}
}
} required | Array of strings or ImageSourceEntity (object) or Array of ImageSourceEntity (objects) (ImageSource) [ items ] Image sequence input data link, as an orderedArray |
| attachmentType required | string The image sequence input type isIMAGE_SEQUENCE Value: "IMAGE_SEQUENCE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (ImageDataRecordMetadata) Image annotation may be used metadata information |
{- "attachmentType": "IMAGE_SEQUENCE",
- "metadata": {
- "additionalInfo": {
- "key-0": "df81acdb-991f-4938-afdd-b2826a0a7bf0"
}, - "size": {
- "width": 1080,
- "height": 1920
}
}
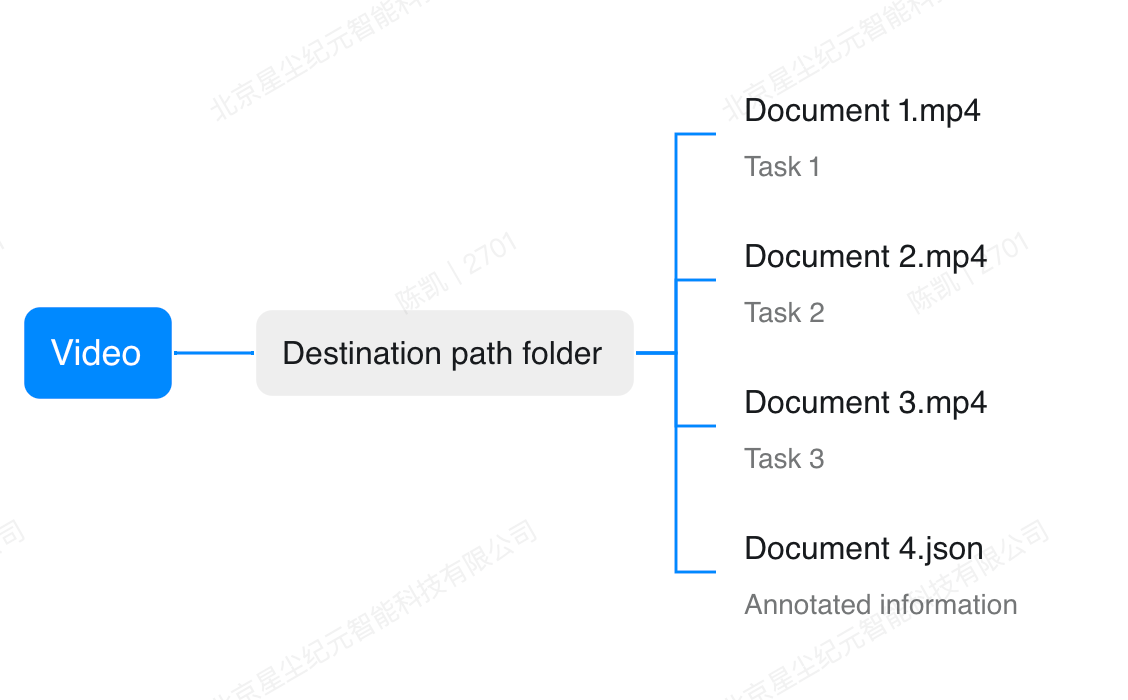
}| attachment required | string video data link |
| attachmentType required | string The video data type isVIDEO Value: "VIDEO" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (VideoDataRecordMetadata) Video annotation may be used metadata information |
{- "attachmentType": "VIDEO",
- "metadata": {
- "uniqueIdentifier": "4eee1a1c-e35e-40c9-97f7-a0f309f5b1ca",
- "fps": 1,
- "duration": 100
}
}| attachment required | string text data link |
| attachmentType required | string Text data type isTEXT Value: "TEXT" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (TextDataRecordMetadata) Text annotation may be used metadata information |
{- "attachmentType": "TEXT",
- "metadata": {
- "uniqueIdentifier": "d600977d-4c0d-401a-9cc6-3577f095e495",
- "title": "example article 96450.4808866211"
}
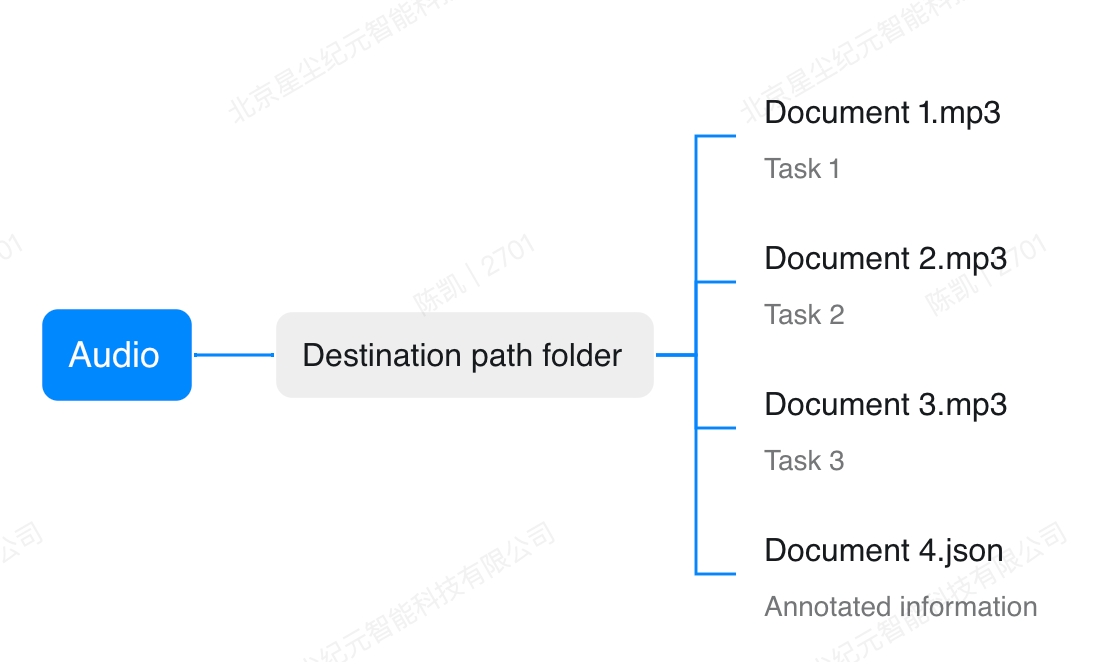
}| attachment required | string audio data link |
| attachmentType required | string The audio data type isAUDIO Value: "AUDIO" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (AudioDataRecordMetadata) Audio annotation may be used metadata information |
{- "attachmentType": "AUDIO",
- "metadata": {
- "uniqueIdentifier": "d600977d-4c0d-401a-9cc6-3577f095e495",
- "title": "Both refined and popular"
}
}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
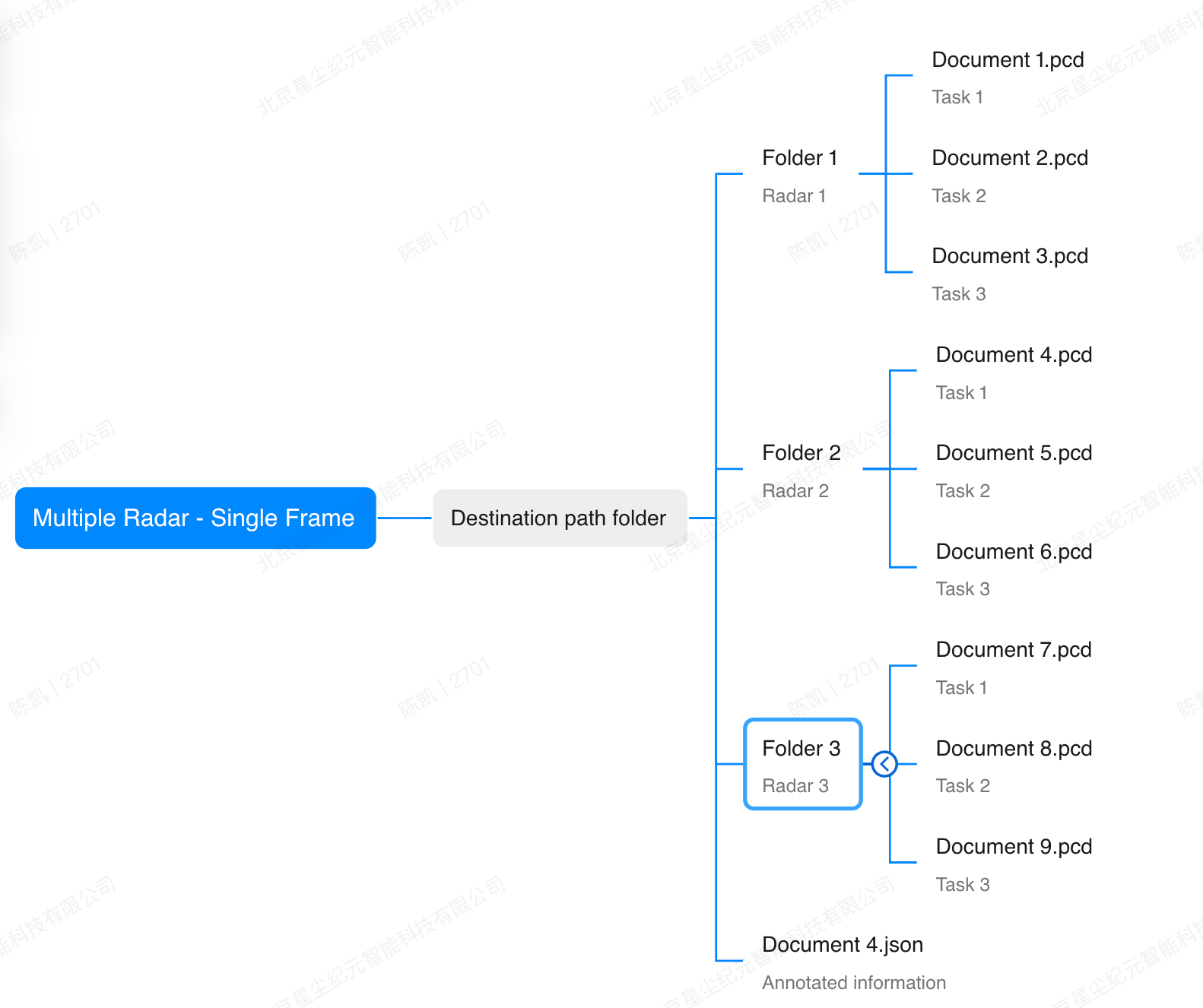
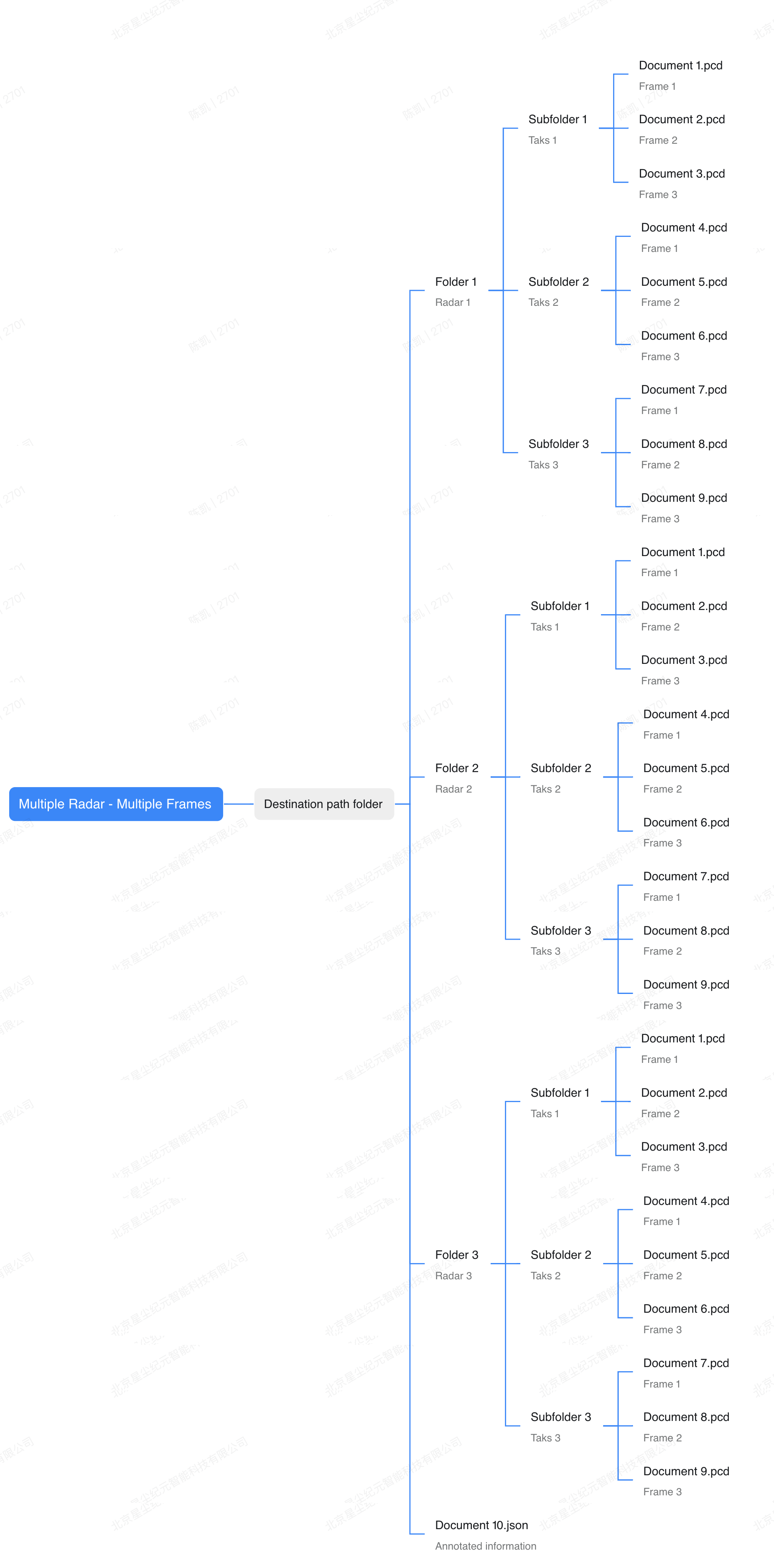
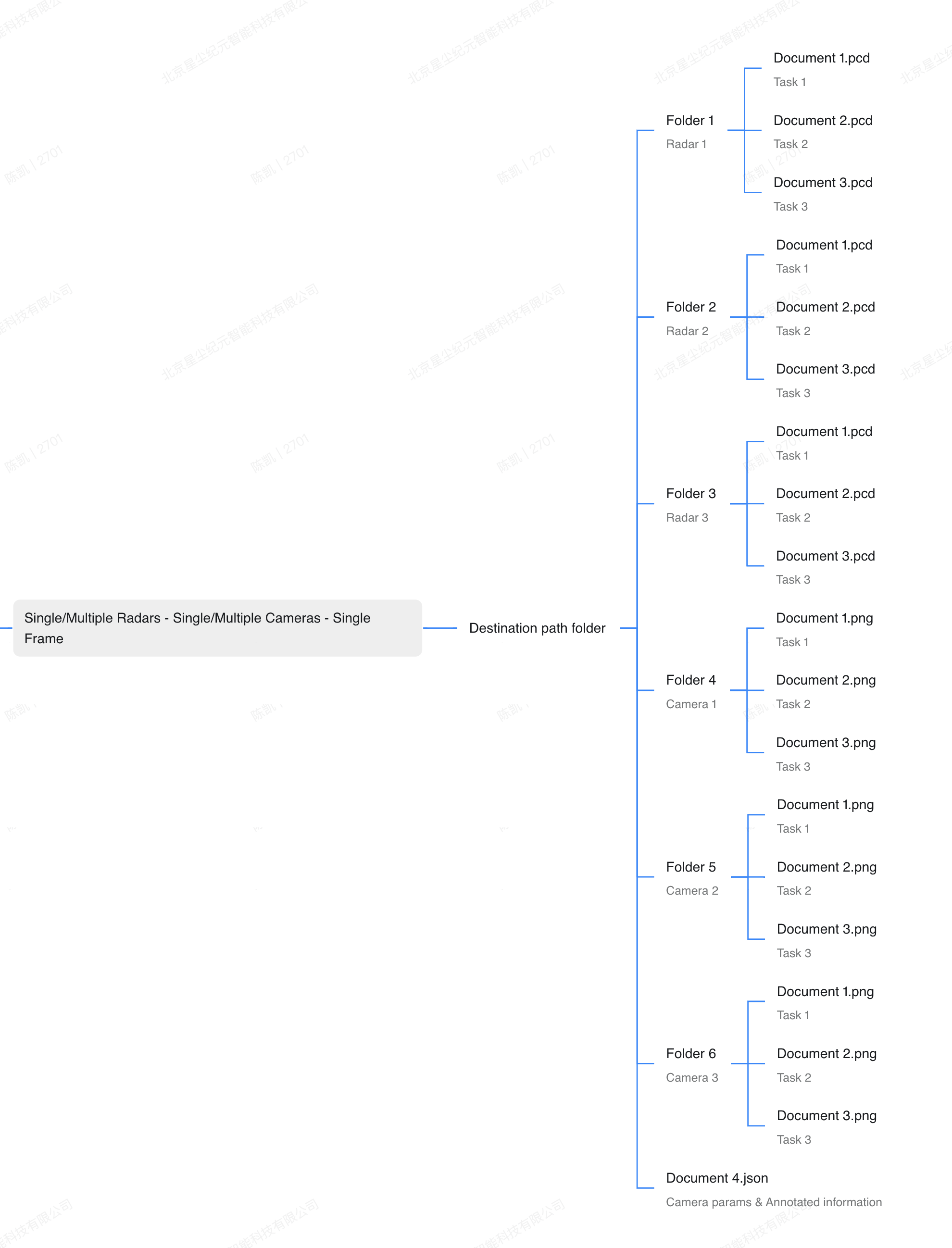
- Point cloud mapping annotation scene requires distinguishing between radar and camera folders
- Radar: lidar-Radar name
- Main radarmainlidar-Radar name
- Camera: camera-camera name
required | string or ImageSourceEntity (object) or Array of ImageSourceEntity (objects) (ImageSource) Single frame picture input data link |
| attachmentType required | string Single frame picture input type isIMAGE Value: "IMAGE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (ImageDataRecordMetadata) Image annotation may be used metadata information |
{- "attachmentType": "IMAGE",
- "metadata": {
- "uniqueIdentifier": "9ba65dab-4614-4601-8df1-2885178862be",
- "size": {
- "width": 1800,
- "height": 740
}, - "preprocessedData": {
- "annotations": [
- {
- "key": "box2d-[3872a]",
- "label": "pear",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "box2d-[69de2]",
- "label": "Apple",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "box2d-[452ed]",
- "label": "banana",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "box2d-[ae65e]",
- "label": "tangerinr",
- "type": "slot",
- "slots": [
- {
- "id": "0b9fc4a3-4ff1-4bfa-bd2f-4f94d66cc9a8",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 667.8271812080536,
- "y": 20.385906040268456
}, - "topRight": {
- "x": 989.4714765100671,
- "y": 20.385906040268456
}, - "bottomRight": {
- "x": 989.4714765100671,
- "y": 283.13758389261744
}, - "bottomLeft": {
- "x": 667.8271812080536,
- "y": 283.13758389261744
}
}
}, - {
- "id": "92c67a72-4dc6-44af-bbed-cd6f407d2765",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 1055.1593959731542,
- "y": 63.42281879194631
}, - "topRight": {
- "x": 1381.3338926174495,
- "y": 63.42281879194631
}, - "bottomRight": {
- "x": 1381.3338926174495,
- "y": 369.21140939597313
}, - "bottomLeft": {
- "x": 1055.1593959731542,
- "y": 369.21140939597313
}
}
}, - {
- "id": "072e526b-7c05-4a7e-a6c1-c582b9d80de5",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 1367.743288590604,
- "y": 97.3993288590604
}, - "topRight": {
- "x": 1691.6526845637582,
- "y": 97.3993288590604
}, - "bottomRight": {
- "x": 1691.6526845637582,
- "y": 448.48993288590606
}, - "bottomLeft": {
- "x": 1367.743288590604,
- "y": 448.48993288590606
}
}
}, - {
- "id": "77551fb5-a6dd-43ae-a250-bfe5daa6bcea",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 1100.461409395973,
- "y": 258.22147651006713
}, - "topRight": {
- "x": 1478.73322147651,
- "y": 258.22147651006713
}, - "bottomRight": {
- "x": 1478.73322147651,
- "y": 566.2751677852349
}, - "bottomLeft": {
- "x": 1100.461409395973,
- "y": 566.2751677852349
}
}
}, - {
- "id": "5c334109-4f0d-4fc6-a825-86147b934a5f",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 1403.984899328859,
- "y": 425.83892617449663
}, - "topRight": {
- "x": 1784.5218120805368,
- "y": 425.83892617449663
}, - "bottomRight": {
- "x": 1784.5218120805368,
- "y": 765.6040268456376
}, - "bottomLeft": {
- "x": 1403.984899328859,
- "y": 765.6040268456376
}
}
}
]
}
], - "operators": [
- {
- "key": "box2d-[3872a]",
- "type": "slot",
- "label": "pear",
- "slotSpecification": {
- "type": "box2d",
- "restrictInsideCanvasBoundary": true
}
}, - {
- "key": "box2d-[69de2]",
- "type": "slot",
- "label": "Apple",
- "slotSpecification": {
- "type": "box2d",
- "restrictInsideCanvasBoundary": true
}
}, - {
- "key": "box2d-[452ed]",
- "type": "slot",
- "label": "banana",
- "slotSpecification": {
- "type": "box2d",
- "restrictInsideCanvasBoundary": true
}
}, - {
- "key": "box2d-[ae65e]",
- "type": "slot",
- "label": "tangerinr",
- "slotSpecification": {
- "type": "box2d",
- "restrictInsideCanvasBoundary": true
}
}
]
}
}
}{kind=link}
required | string or ImageSourceEntity (object) or Array of ImageSourceEntity (objects) (ImageSource) Single frame picture input data link |
| attachmentType required | string Single frame picture input type isIMAGE Value: "IMAGE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (ImageDataRecordMetadata) Image annotation may be used metadata information |
{- "attachmentType": "IMAGE",
- "metadata": {
- "uniqueIdentifier": "9ba65dab-4614-4601-8df1-2885178862be",
- "size": {
- "width": 1800,
- "height": 740
}, - "preprocessedData": {
- "annotations": [
- {
- "key": "polygon-[3872a]",
- "label": "pear",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "polygon-[69de2]",
- "label": "Apple",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "polygon-[452ed]",
- "label": "banana",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "polygon-[ae65e]",
- "label": "tangerinr",
- "type": "slot",
- "slots": [
- {
- "id": "a9846732-4a49-4164-8a88-13c8c1371305",
- "type": "polygon",
- "vertices": [
- {
- "x": 416.7184774847461,
- "y": 447.7357059737121
}, - {
- "x": 484.74320354656743,
- "y": 463.28421478784264
}, - {
- "x": 524.5862573827771,
- "y": 538.1114134558462
}, - {
- "x": 497.7422529235945,
- "y": 574.3872888249156
}, - {
- "x": 396.53721399462967,
- "y": 455.80360684754265
}
], - "label": "tangerinr"
}, - {
- "id": "d966ed57-d3f2-42a0-88e9-62ede54d54bc",
- "type": "polygon",
- "vertices": [
- {
- "x": 393.4088459541643,
- "y": 438.7020552835834
}, - {
- "x": 343.0425241751721,
- "y": 377.1054049998159
}, - {
- "x": 267.4930415066839,
- "y": 514.932163922058
}, - {
- "x": 390.68634207421877,
- "y": 457.4192694582089
}, - {
- "x": 393.0685329691711,
- "y": 450.27269677335187
}
], - "label": "tangerinr"
}, - {
- "id": "532797e0-8100-4cd0-9a62-f944afa65888",
- "type": "polygon",
- "vertices": [
- {
- "x": 548.2866077745582,
- "y": 418.620925208125
}, - {
- "x": 505.12596330828364,
- "y": 347.4243065586294
}, - {
- "x": 435.7738166445262,
- "y": 355.1710888987299
}, - {
- "x": 429.87150629016384,
- "y": 361.4422936502399
}, - {
- "x": 546.44213578882,
- "y": 425.62991875393027
}
], - "label": "tangerinr"
}
]
}
], - "operators": [
- {
- "key": "polygon-[3872a]",
- "type": "slot",
- "label": "pear",
- "slotSpecification": {
- "type": "polygon",
- "restrictInsideCanvasBoundary": false
}
}, - {
- "key": "polygon-[69de2]",
- "type": "slot",
- "label": "Apple",
- "slotSpecification": {
- "type": "polygon",
- "restrictInsideCanvasBoundary": false
}
}, - {
- "key": "polygon-[452ed]",
- "type": "slot",
- "label": "banana",
- "slotSpecification": {
- "type": "polygon",
- "restrictInsideCanvasBoundary": false
}
}, - {
- "key": "polygon-[ae65e]",
- "type": "slot",
- "label": "tangerinr",
- "slotSpecification": {
- "type": "polygon",
- "restrictInsideCanvasBoundary": false
}
}
]
}
}
} required | string or ImageSourceEntity (object) or Array of ImageSourceEntity (objects) (ImageSource) Single frame picture input data link |
| attachmentType required | string Single frame picture input type isIMAGE Value: "IMAGE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (ImageDataRecordMetadata) Image annotation may be used metadata information |
{- "attachmentType": "IMAGE",
- "metadata": {
- "uniqueIdentifier": "9ba65dab-4614-4601-8df1-2885178862be",
- "size": {
- "width": 1800,
- "height": 740
}, - "preprocessedData": {
- "annotations": [
- {
- "key": "polygon-[82bb6]",
- "label": "fruit",
- "type": "slotChildren",
- "slotsChildren": [
- {
- "slot": {
- "id": "a9846732-4a49-4164-8a88-13c8c1371305",
- "type": "polygon",
- "vertices": [
- {
- "x": 416.7184774847461,
- "y": 447.7357059737121
}, - {
- "x": 484.74320354656743,
- "y": 463.28421478784264
}, - {
- "x": 524.5862573827771,
- "y": 538.1114134558462
}, - {
- "x": 497.7422529235945,
- "y": 574.3872888249156
}, - {
- "x": 396.53721399462967,
- "y": 455.80360684754265
}
], - "label": "fruit"
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "input": {
- "type": "select",
- "value": "pear"
}
}, - {
- "key": "select-[70333]",
- "label": "colour",
- "type": "input",
- "input": {
- "type": "select",
- "value": "yellow"
}
}
]
}, - {
- "slot": {
- "id": "d966ed57-d3f2-42a0-88e9-62ede54d54bc",
- "type": "polygon",
- "vertices": [
- {
- "x": 393.4088459541643,
- "y": 438.7020552835834
}, - {
- "x": 343.0425241751721,
- "y": 377.1054049998159
}, - {
- "x": 267.4930415066839,
- "y": 514.932163922058
}, - {
- "x": 390.68634207421877,
- "y": 457.4192694582089
}, - {
- "x": 393.0685329691711,
- "y": 450.27269677335187
}
], - "label": "fruit"
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "input": {
- "type": "select",
- "value": "Kiwi"
}
}, - {
- "key": "select-[70333]",
- "label": "colour",
- "type": "input",
- "input": {
- "type": "select",
- "value": "green"
}
}
]
}, - {
- "slot": {
- "id": "532797e0-8100-4cd0-9a62-f944afa65888",
- "type": "polygon",
- "vertices": [
- {
- "x": 548.2866077745582,
- "y": 418.620925208125
}, - {
- "x": 505.12596330828364,
- "y": 347.4243065586294
}, - {
- "x": 435.7738166445262,
- "y": 355.1710888987299
}, - {
- "x": 429.87150629016384,
- "y": 361.4422936502399
}, - {
- "x": 546.44213578882,
- "y": 425.62991875393027
}
], - "label": "fruit"
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "input": {
- "type": "select",
- "value": "Apple"
}
}, - {
- "key": "select-[70333]",
- "label": "colour",
- "type": "input",
- "input": {
- "type": "select",
- "value": "Red"
}
}
]
}
]
}
], - "operators": [
- {
- "key": "polygon-[82bb6]",
- "type": "slotChildren",
- "label": "fruit",
- "slotSpecification": {
- "type": "polygon",
- "restrictInsideCanvasBoundary": false
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "inputSpecification": {
- "type": "select",
- "items": [
- "Apple",
- "pear",
- "tangerinr",
- "banana"
], - "renderConfig": {
- "selectionWidgetType": "Segment"
}, - "allowArbitraryInput": true
}, - "inputOption": {
- "required": true
}
}, - {
- "key": "select-[70333]",
- "label": "colour",
- "type": "input",
- "inputSpecification": {
- "type": "select",
- "items": [
- "Red",
- "yellow",
- "green",
- "orange"
], - "renderConfig": {
- "selectionWidgetType": "Segment"
}, - "allowArbitraryInput": true
}, - "inputOption": {
- "required": true
}
}
]
}
]
}
}
}| attachment required | string text data link |
| attachmentType required | string Text data type isTEXT Value: "TEXT" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (TextDataRecordMetadata) Text annotation may be used metadata information |
{- "attachmentType": "TEXT",
- "metadata": {
- "uniqueIdentifier": "d600977d-4c0d-401a-9cc6-3577f095e495",
- "title": "example article",
- "preprocessedData": {
- "annotations": [
- {
- "key": "text-1",
- "label": "figure",
- "type": "slotChildren",
- "slotsChildren": [
- {
- "slot": {
- "type": "text",
- "label": "figure",
- "text": "Akari",
- "start": 84,
- "length": 2,
- "id": "e1ed82e9-085c-494c-8513-2580657c8b9f"
}, - "children": [
- {
- "key": "text-11",
- "label": "Profession",
- "type": "input",
- "input": {
- "type": "text",
- "value": "develop"
}
}
]
}, - {
- "slot": {
- "type": "text",
- "label": "figure",
- "text": "Xiaoming",
- "start": 758,
- "length": 3,
- "id": "50f1cf15-1cce-4e0d-90c9-16b5c2ebc244"
}, - "children": [
- {
- "key": "text-11",
- "label": "Profession",
- "type": "input",
- "input": {
- "type": "text",
- "value": "product"
}
}
]
}, - {
- "slot": {
- "type": "text",
- "label": "figure",
- "text": "little xiaoming",
- "start": 936,
- "length": 4,
- "id": "627bfaf7-367f-482b-ac95-5f0a9d18f66f"
}, - "children": [
- {
- "key": "text-11",
- "label": "Profession",
- "type": "input",
- "input": {
- "type": "text",
- "value": "test"
}
}
]
}
]
}
], - "operators": [
- {
- "key": "text-1",
- "type": "slotChildren",
- "label": "figure",
- "children": [
- {
- "key": "text-11",
- "type": "input",
- "label": "Profession",
- "inputSpecification": {
- "type": "text"
}
}
], - "instanceOption": {
- "minQuantity": 0
}, - "slotSpecification": {
- "type": "text",
- "minLength": 2
}
}
]
}
}
} required | Array of objects (PointCloudSource) [ items ] point cloud sequence data source |
| attachmentType required | string The point cloud sequence input type isPOINTCLOUD_SEQUENCE Value: "POINTCLOUD_SEQUENCE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (PointCloudDataRecordMetadata) Point cloud annotation may be used metadata information |
{- "attachmentType": "POINTCLOUD_SEQUENCE",
- "attachment": [
], - "metadata": {
- "uniqueIdentifier": "1ddaf374a6f881cb754364863ddd3a91",
- "preprocessedData": {
- "annotations": [
- {
- "key": "box3d-[ba789]",
- "type": "slotChildren",
- "label": "3DBox",
- "slotsChildren": [
- {
- "slot": {
- "id": "2ca1d035-bfa8-4a07-9897-5016df24a1a7",
- "box": [
- 0.6050732739056698,
- -1.588674394961118,
- 0,
- 0,
- 4.205314574897077,
- 1.6016645485738317,
- 0,
- 0,
- 0,
- 0,
- 1.6,
- 0,
- -4.448469270917743,
- -2.5007034270352,
- -0.7,
- 1
], - "type": "box3d",
- "label": "Instance"
}, - "children": [
- {
- "key": "box2d-[63939]",
- "label": "2DBoxmap",
- "type": "slot",
- "slots": [ ]
}
]
}
]
}
], - "operators": [
- {
- "key": "box3d-[ba789]",
- "type": "slotChildren",
- "label": "3DBox",
- "slotSpecification": {
- "type": "box3d"
}, - "children": [
- {
- "key": "box2d-[63939]",
- "label": "2DBoxmap",
- "type": "slot",
- "slots": [ ]
}
]
}
]
}
}
} required | Array of objects (PointCloudSource) [ items ] point cloud sequence data source |
| attachmentType required | string The point cloud sequence input type isPOINTCLOUD_SEQUENCE Value: "POINTCLOUD_SEQUENCE" |
| extraInfoUrls | Array of strings Additional reference information can be url link or text, needs to be aArray |
object (PointCloudDataRecordMetadata) Point cloud annotation may be used metadata information |
{- "attachmentType": "POINTCLOUD_SEQUENCE",
- "attachment": {
- "imageSources": [
- {
- "name": "camera12",
- "height": 2168,
- "width": 3848
}
]
}, - "metadata": {
- "uniqueIdentifier": "1ddaf374a6f881cb754364863ddd3a91",
- "preprocessedData": {
- "annotations": [
- {
- "key": "box3d-[ba789]",
- "label": "Instance",
- "type": "slotChildren",
- "slotsChildren": [
- {
- "slot": {
- "id": "b1b16b83-69b8-4874-9c7b-7dd26f9b33e6",
- "box": [
- 0.38079912676697997,
- -1.6568017458505728,
- 0,
- 0,
- 4.385651680192693,
- 1.0079976885008293,
- 0,
- 0,
- 0,
- 0,
- 1.6,
- 0,
- -14.887393930786155,
- -5.327651500890406,
- -0.7,
- 1
], - "type": "box3d",
- "label": "Instance",
- "timeSeries": {
- "0": {
- "type": "appear",
- "value": [
- 0.4640958483556172,
- -1.703938184341116,
- 0,
- 0,
- 4.341834470201614,
- 1.1825706885294414,
- 0,
- 0,
- 0,
- 0,
- 1.6452480225659933,
- 0,
- -14.605222401692387,
- -5.574828465892366,
- -1.1253759887170036,
- 1
]
}
}
}, - "children": [
- {
- "label": "2DBoxmap",
- "slotSpecification": {
- "sizeCheckSwitch": true,
- "topLeftMark": "1",
- "topRightMark": "2",
- "bottomLeftMark": "4",
- "bottomRightMark": "3",
- "restrictInsideCanvasBoundary": true,
- "type": "box2d"
}
}
]
}
]
}
], - "operators": [
- {
- "key": "box3d-[ba789]",
- "type": "slotChildren",
- "label": "3DBox",
- "slotSpecification": {
- "type": "box3d"
}, - "children": [
- {
- "label": "2DBoxmap",
- "slotSpecification": {
- "sizeCheckSwitch": true,
- "topLeftMark": "1",
- "topRightMark": "2",
- "bottomLeftMark": "4",
- "bottomRightMark": "3",
- "restrictInsideCanvasBoundary": true,
- "type": "box2d"
}
}
]
}
]
}
}
}{kind=link}
required | Array of AnnotationSlot (object) or AnnotationSlotChildren (object) or AnnotationInput (object) or AnnotationAnchor (object) or AnnotationChildrenOnly (object) (Annotation) [ items ] All annotation results of the current task |
Array of AnnotationSlot (object) or AnnotationSlotChildren (object) or AnnotationInput (object) or AnnotationAnchor (object) or AnnotationChildrenOnly (object) (Annotation) [ items ] | |
required | Array of AnnotationMisplacedIssue (object) or AnnotationExtraIssue (object) or AnnotationMissingIssue (object) (AnnotationIssue) [ items ] |
object Auxiliary annotation results of the current taskmetadatainformation | |
required | Array of objects (AnnotationNote) [ items ] |
{- "annotations": [
- {
- "key": "string",
- "label": "string",
- "slots": [
- {
- "confidence": 0,
- "confirmed": true,
- "hintConfidence": "High",
- "hintStatus": "Unconfirmed",
- "id": "string",
- "label": "string",
- "length": 0,
- "metadata": {
- "algorithmId": 0,
- "dataSource": 1
}, - "poolId": 0,
- "selection": "string",
- "source": "string",
- "start": 0,
- "teamId": 0,
- "text": "string",
- "type": "text",
- "userId": 0
}
], - "type": "slot"
}
], - "hints": [
- {
- "key": "string",
- "label": "string",
- "slots": [
- {
- "confidence": 0,
- "confirmed": true,
- "hintConfidence": "High",
- "hintStatus": "Unconfirmed",
- "id": "string",
- "label": "string",
- "length": 0,
- "metadata": {
- "algorithmId": 0,
- "dataSource": 1
}, - "poolId": 0,
- "selection": "string",
- "source": "string",
- "start": 0,
- "teamId": 0,
- "text": "string",
- "type": "text",
- "userId": 0
}
], - "type": "slot"
}
], - "issues": [
- {
- "actions": [
- {
- "comments": [
- "string"
], - "createdAt": "string",
- "note": "string",
- "pool": {
- "id": 0,
- "name": "string",
- "operatorIDBlackList": [
- "string"
], - "rejectTaskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "taskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "type": 0
}, - "taskId": 0,
- "team": {
- "id": 0,
- "name": "string"
}, - "type": "Create",
- "user": {
- "id": 0,
- "name": "string",
- "phone": "string"
}
}
], - "annotationPath": [
- "string"
], - "id": "string",
- "issuePoint": {
- "errorCount": 0,
- "errorPointsList": [
- 0
]
}, - "location": {
- "position": 0,
- "source": "string",
- "type": "text"
}, - "timeFrame": 0,
- "type": 0
}
], - "metadata": {
- "imageRotateAngle": 0,
- "interpolateMethod": "nearest",
- "invalidFrame": [
- 0
], - "noNeedToAnnotate": true,
- "pintCloudMapScope": 0
}, - "notes": [
- {
- "createdAt": "string",
- "note": "string",
- "pool": {
- "id": 0,
- "name": "string",
- "operatorIDBlackList": [
- "string"
], - "rejectTaskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "taskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "type": 0
}, - "taskId": 0,
- "team": {
- "id": 0,
- "name": "string"
}, - "user": {
- "id": 0,
- "name": "string",
- "phone": "string"
}
}
]
} required | Array of AnnotationSlot (object) or AnnotationSlotChildren (object) or AnnotationInput (object) or AnnotationAnchor (object) or AnnotationChildrenOnly (object) (Annotation) [ items ] All annotation results of the current task |
Array of AnnotationSlot (object) or AnnotationSlotChildren (object) or AnnotationInput (object) or AnnotationAnchor (object) or AnnotationChildrenOnly (object) (Annotation) [ items ] | |
required | Array of AnnotationMisplacedIssue (object) or AnnotationExtraIssue (object) or AnnotationMissingIssue (object) (AnnotationIssue) [ items ] |
object Auxiliary annotation results of the current taskmetadatainformation | |
required | Array of objects (AnnotationNote) [ items ] |
{- "annotations": [
- {
- "key": "string",
- "label": "string",
- "slots": [
- {
- "confidence": 0,
- "confirmed": true,
- "hintConfidence": "High",
- "hintStatus": "Unconfirmed",
- "id": "string",
- "label": "string",
- "length": 0,
- "metadata": {
- "algorithmId": 0,
- "dataSource": 1
}, - "poolId": 0,
- "selection": "string",
- "source": "string",
- "start": 0,
- "teamId": 0,
- "text": "string",
- "type": "text",
- "userId": 0
}
], - "type": "slot"
}
], - "hints": [
- {
- "key": "string",
- "label": "string",
- "slots": [
- {
- "confidence": 0,
- "confirmed": true,
- "hintConfidence": "High",
- "hintStatus": "Unconfirmed",
- "id": "string",
- "label": "string",
- "length": 0,
- "metadata": {
- "algorithmId": 0,
- "dataSource": 1
}, - "poolId": 0,
- "selection": "string",
- "source": "string",
- "start": 0,
- "teamId": 0,
- "text": "string",
- "type": "text",
- "userId": 0
}
], - "type": "slot"
}
], - "issues": [
- {
- "actions": [
- {
- "comments": [
- "string"
], - "createdAt": "string",
- "note": "string",
- "pool": {
- "id": 0,
- "name": "string",
- "operatorIDBlackList": [
- "string"
], - "rejectTaskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "taskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "type": 0
}, - "taskId": 0,
- "team": {
- "id": 0,
- "name": "string"
}, - "type": "Create",
- "user": {
- "id": 0,
- "name": "string",
- "phone": "string"
}
}
], - "annotationPath": [
- "string"
], - "id": "string",
- "issuePoint": {
- "errorCount": 0,
- "errorPointsList": [
- 0
]
}, - "location": {
- "position": 0,
- "source": "string",
- "type": "text"
}, - "timeFrame": 0,
- "type": 0
}
], - "metadata": {
- "imageRotateAngle": 0,
- "interpolateMethod": "nearest",
- "invalidFrame": [
- 0
], - "noNeedToAnnotate": true,
- "pintCloudMapScope": 0
}, - "notes": [
- {
- "createdAt": "string",
- "note": "string",
- "pool": {
- "id": 0,
- "name": "string",
- "operatorIDBlackList": [
- "string"
], - "rejectTaskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "taskCountDown": {
- "day": 0,
- "hour": 0,
- "minute": 0
}, - "type": 0
}, - "taskId": 0,
- "team": {
- "id": 0,
- "name": "string"
}, - "user": {
- "id": 0,
- "name": "string",
- "phone": "string"
}
}
]
}| key required | string action itemid, used to distinguish different operation items of the same type。such as twoBox2dOne action item marks apples and the other marks pears |
| label required | string Action item name |
required | Array of TextSlot (object) or Box2dSlot (object) or Box3DSlot (object) or SemanticSegmentation2DSlot (object) or SemanticSegmentation3DSlot (object) or PointSlot (object) or Point3DSlot (object) or LineSlot (object) or Line3DSlot (object) or SplinesSlot (object) or CuboidSlot (object) or PolygonSlot (object) or Polygon3DSlot (object) or AudioRecordingSlot (object) or TimeSliceSlot (object) or FileSlot (object) (Slot) [ items ] A sequence of marked results from the action item。Multiple targets can appear in the same task and need to be marked with the current action item, such as multiple apples |
| type required | string The action item is of typeslot Value: "slot" |
{- "key": "box2d-[ae65e]",
- "label": "tangerinr",
- "type": "slot",
- "slots": [
- {
- "id": "0b9fc4a3-4ff1-4bfa-bd2f-4f94d66cc9a8",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 667.8271812080536,
- "y": 20.385906040268456
}, - "topRight": {
- "x": 989.4714765100671,
- "y": 20.385906040268456
}, - "bottomRight": {
- "x": 989.4714765100671,
- "y": 283.13758389261744
}, - "bottomLeft": {
- "x": 667.8271812080536,
- "y": 283.13758389261744
}
}
}, - {
- "id": "92c67a72-4dc6-44af-bbed-cd6f407d2765",
- "type": "box2d",
- "label": "tangerinr",
- "plane": {
- "topLeft": {
- "x": 1055.1593959731542,
- "y": 63.42281879194631
}, - "topRight": {
- "x": 1381.3338926174495,
- "y": 63.42281879194631
}, - "bottomRight": {
- "x": 1381.3338926174495,
- "y": 369.21140939597313
}, - "bottomLeft": {
- "x": 1055.1593959731542,
- "y": 369.21140939597313
}
}
}
]
}| key required | string action itemid, used to distinguish different operation items of the same type。such as twoBox2dOne action item marks apples and the other marks pears |
| label required | string Action item name |
required | Array of TextSlot (object) or Box2dSlot (object) or Box3DSlot (object) or SemanticSegmentation2DSlot (object) or SemanticSegmentation3DSlot (object) or PointSlot (object) or Point3DSlot (object) or LineSlot (object) or Line3DSlot (object) or SplinesSlot (object) or CuboidSlot (object) or PolygonSlot (object) or Polygon3DSlot (object) or AudioRecordingSlot (object) or TimeSliceSlot (object) or FileSlot (object) (Slot) [ items ] A sequence of marked results from the action item。Multiple targets can appear in the same task and need to be marked with the current action item, such as multiple apples |
| type required | string The action item is of typeslot Value: "slot" |
{- "key": "text-[21d18]",
- "type": "slot",
- "label": "company",
- "slots": [
- {
- "id": "459621b5-ca71-4d56-99c3-e91aa1f09428",
- "text": "Standard & Poor's 500 constituent company",
- "type": "text",
- "label": "company",
- "start": 180,
- "length": 14
}, - {
- "id": "99510c08-8002-4277-a738-68d5601a29cb",
- "text": "Companies in the Dow Jones Industrial Average",
- "type": "text",
- "label": "company",
- "start": 204,
- "length": 14
}
]
}| key required | string action itemid, used to distinguish different operation items of the same type。such as twoBox2dOne action item marks apples and the other marks pears |
| label required | string Action item name |
required | Array of TextSlot (object) or Box2dSlot (object) or Box3DSlot (object) or SemanticSegmentation2DSlot (object) or SemanticSegmentation3DSlot (object) or PointSlot (object) or Point3DSlot (object) or LineSlot (object) or Line3DSlot (object) or SplinesSlot (object) or CuboidSlot (object) or PolygonSlot (object) or Polygon3DSlot (object) or AudioRecordingSlot (object) or TimeSliceSlot (object) or FileSlot (object) (Slot) [ items ] A sequence of marked results from the action item。Multiple targets can appear in the same task and need to be marked with the current action item, such as multiple apples |
| type required | string The action item is of typeslot Value: "slot" |
{- "key": "cuboid-[066e9]",
- "label": "car",
- "type": "slot",
- "slots": [
- {
- "id": "92878942-e064-4f45-99a3-976aa7514cf2",
- "type": "cuboid",
- "vertices": {
- "front": {
- "topLeft": {
- "x": 236.20129870129867,
- "y": 427.0408163265306
}, - "topRight": {
- "x": 466.6280148423005,
- "y": 427.0408163265306
}, - "bottomRight": {
- "x": 466.6280148423005,
- "y": 599.860853432282
}, - "bottomLeft": {
- "x": 236.20129870129867,
- "y": 599.860853432282
}
}, - "back": {
- "topLeft": {
- "x": 263.75231910946184,
- "y": 405.751391465677
}, - "topRight": {
- "x": 494.1790352504638,
- "y": 405.751391465677
}, - "bottomRight": {
- "x": 494.1790352504638,
- "y": 578.5714285714286
}, - "bottomLeft": {
- "x": 263.75231910946184,
- "y": 578.5714285714286
}
}
}, - "label": "car"
}, - {
- "id": "b7969ec0-afd8-4ed1-b385-4fcab086f61e",
- "type": "cuboid",
- "vertices": {
- "front": {
- "topLeft": {
- "x": 794.7356215213358,
- "y": 503.43228200371055
}, - "topRight": {
- "x": 1144.1326530612246,
- "y": 503.43228200371055
}, - "bottomRight": {
- "x": 1144.1326530612246,
- "y": 672.4953617810761
}, - "bottomLeft": {
- "x": 794.7356215213358,
- "y": 672.4953617810761
}
}, - "back": {
- "topLeft": {
- "x": 798.249688849656,
- "y": 457.42331883113707
}, - "topRight": {
- "x": 1136.6187384044526,
- "y": 457.42331883113707
}, - "bottomRight": {
- "x": 1136.6187384044526,
- "y": 621.1502782931354
}, - "bottomLeft": {
- "x": 798.249688849656,
- "y": 621.1502782931354
}
}
}, - "label": "car"
}
]
}| confidence | number The current pre-marked text mark matching degree |
| confirmed | boolean Whether the current pre-label text tag is applied to the actual label |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string of the current text tag instanceid |
| label required | string The name of the current text tag instance |
| length | number The selected text length of the current text marker instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| selection | string |
| source | string |
| start | number The starting position of the selected text for the current text marker instance |
| teamId | number Fields to assist big data statistics |
| text required | string The selected text content of the current text tag instance |
| type required | string A text tag instance is of typetext Value: "text" |
| userId | number Fields to assist big data statistics |
{- "id": "ab662508-c2da-4b71-9e1b-ef4b451aaf3a",
- "label": "illustrate",
- "length": 20,
- "start": 71,
- "text": "Desert rose taken at Haikou Tropical Agricultural Science and Technology Expo Park。",
- "type": "text"
}| binding | boolean |
| confidence | number current pre-markBox2dmark match |
| confirmed | boolean current pre-markBox2dWhether the markup is applied to the actual callout |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string currentBox2dtag instanceid |
| label required | string currentBox2dThe name of the tag instance |
object (AnnotationBaseMetadata) | |
required | object (Plane) currentBox2dPlanar position information for marker instances |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CPlane%3E) | |
| type required | string Box2dThe type of the tag instance isbox2d Value: "box2d" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "f6933a2f-1d81-406f-a3c9-5f815608cded",
- "type": "box2d",
- "label": "2DBox",
- "plane": {
- "topLeft": {
- "x": 1646.777661098621,
- "y": 418.0883674569412
}, - "topRight": {
- "x": 1914.4281130577788,
- "y": 418.0883674569412
}, - "bottomLeft": {
- "x": 1646.777661098621,
- "y": 528.3400441447245
}, - "bottomRight": {
- "x": 1914.4281130577788,
- "y": 528.3400441447245
}
}
}Coordinate system description: The laser radar coordinate system is used, and the forward direction of the vehicle is taken as thexthe axis's positive direction's right-handed system
| box required | Array of numbers (Box3D) [ items ] currentBox3DThe location information of the marker instance, the default is onematrix4, from which the deflection angle can be obtained、location and size information。 |
| confidence | number current pre-markBox3Dmark match |
| confirmed | boolean current pre-markBox3DWhether the markup is applied to the actual callout |
| consistent | boolean |
| coordinate | string (InterpolatedCoordinate) Enum: "world" "local" |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string currentBox3Dtag instanceid |
| immovable | boolean |
| label required | string currentBox3DThe name of the tag instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CBox3D%3E) | |
| type required | string Box3DThe type of the tag instance isbox3d Value: "box3d" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "fd969829-840c-41bd-8fd4-a257d155b30a",
- "box": [
- 1.8755938696413719,
- 0.75671379643303,
- 0,
- 0,
- -0.6380881901892723,
- 1.5815679632788013,
- 0,
- 0,
- 0,
- 0,
- 2,
- 0,
- 4.290810671210171,
- -2.192607441925502,
- -1,
- 1
], - "type": "box3d",
- "label": "3DBox"
}| binding | boolean |
| confidence | number Current pre-punctuation mark match |
| confirmed | boolean Whether the current pre-punctuation mark is applied to the actual callout |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string The current point marks the instance'sid |
| label required | string The name of the current point marker instance |
object (AnnotationBaseMetadata) | |
required | object (Point) Point position information for the current point marker instance |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CPoint%3E) | |
| type required | string Line marker instances are of typepoint Value: "point" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "3f24479a-88b0-42f1-ba6b-e4d1eacf55ef",
- "type": "point",
- "label": "key point",
- "point": {
- "x": 636.7976302699348,
- "y": 562.9692180236332
}
}| binding | boolean |
| confidence | number The matching degree of the current pre-marked line mark |
| confirmed | boolean Whether the current pre-mark line mark is applied to the actual mark |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string of the current line marker instanceid |
| label required | string The name of the current line marker instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cdef-alias-986760303-189-252-986760303-0-5593%5B%5D%3E) | |
| type required | string Line marker instances are of typeline Value: "line" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
required | Array of objects (Point) [ items ] Point position information for the current line marker instance |
{- "id": "29d45554-d7aa-413a-bbe1-5684c5a2ed78",
- "type": "line",
- "label": "lane line",
- "vertices": [
- {
- "x": 79.58865315447801,
- "y": 342.9254851394552
}, - {
- "x": 322.4011297626279,
- "y": 306.53860103679295
}, - {
- "x": 650.582834457793,
- "y": 307.23834880799797
}, - {
- "x": 950.4163122671865,
- "y": 322.21554179574804
}, - {
- "x": 1205.636312416821,
- "y": 367.43168355454156
}, - {
- "x": 1205.636312416821,
- "y": 367.43168355454156
}
]
}| binding | boolean |
| confidence | number The matching degree of the current prescale curve markers |
| confirmed | boolean Whether the current prescale curve mark is applied to the actual mark |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string of the current curve marker instanceid |
| label required | string The name of the current curve marker instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cdef-alias-986760303-189-252-986760303-0-5593%5B%5D%3E) | |
| type required | string Curve marker instances are of typesplines Value: "splines" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
required | Array of objects (Point) [ items ] Point position information for the current curve marker instance |
{- "id": "408ef583-c76f-4e4a-9392-7711bd15f901",
- "type": "splines",
- "label": "Dividing line",
- "vertices": [
- {
- "x": 1901.3573839553087,
- "y": 5472
}, - {
- "x": 2086.6416646118337,
- "y": 5455.132762655532
}, - {
- "x": 2419.2421356264153,
- "y": 5435.389355700328
}, - {
- "x": 2663.7566371485505,
- "y": 5430.833184864511
}, - {
- "x": 2920.420927566196,
- "y": 5458.1702098794085
}, - {
- "x": 3070.77456514813,
- "y": 5472
}
]
}| binding | boolean |
| confidence | number current pre-markCuboidmark match |
| confirmed | boolean current pre-markCuboidWhether the markup is applied to the actual callout |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string currentCuboidtag instanceid |
| label required | string currentCuboidThe name of the tag instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CCuboidVertices%3E) | |
| type required | string CuboidThe type of the tag instance iscuboid Value: "cuboid" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
required | object (CuboidVertices) currentCuboidLocation information of the marked instance |
{- "id": "21255fbb-58ab-4a28-bd7f-db8e208b363e",
- "type": "cuboid",
- "label": "three-dimensional frame",
- "vertices": {
- "back": {
- "topLeft": {
- "x": 149.30424974796247,
- "y": 491.73563539455097
}, - "topRight": {
- "x": 158.09648116024135,
- "y": 532.2409169643605
}, - "bottomLeft": {
- "x": 124.73088635267288,
- "y": 561.3481417334127
}, - "bottomRight": {
- "x": 133.52311776495176,
- "y": 601.8534233032223
}
}, - "front": {
- "topLeft": {
- "x": 350.0787157030726,
- "y": 520.9556661468728
}, - "topRight": {
- "x": 358.87094711535144,
- "y": 561.4609477166823
}, - "bottomLeft": {
- "x": 325.505352307783,
- "y": 590.5681724857345
}, - "bottomRight": {
- "x": 334.2975837200619,
- "y": 631.0734540555441
}
}, - "combineTransform": true
}
}| binding | boolean |
object (BoundaryIndex) | |
| confidence | number Current pre-marked polygon mark matching degree |
| confirmed | boolean Whether the current pre-labeled polygon marker is applied to the actual label |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string of the current polygon marker instanceid |
Array of objects (InteractiveSegmentationPoint) [ items ] | |
| label required | string The name of the current polygon marker instance |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cdef-alias-986760303-189-252-986760303-0-5593%5B%5D%3E) | |
| type required | string Polygon marker instances are of typepolygon Value: "polygon" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
required | Array of objects (Point) [ items ] point position information for the current polygon marker instance |
{- "id": "f6ec27a8-c722-42b8-8968-2b32b30ebee6",
- "type": "polygon",
- "label": "polygon box",
- "vertices": [
- {
- "x": 1901.2074316476771,
- "y": 2309.5505985455475
}, - {
- "x": 2009.780966811051,
- "y": 2302.3434816635345
}, - {
- "x": 2525.106723207308,
- "y": 2269.984862710364
}, - {
- "x": 2536.1868972347643,
- "y": 2417.5068883702193
}, - {
- "x": 2053.1397594005916,
- "y": 2447.722850953062
}, - {
- "x": 1913.3525560261196,
- "y": 2458.3154735747667
}
]
}| confidence | number current pre-mark3DSemantic segmentation mark matching degree |
| confirmed | boolean current pre-mark3DWhether semantic segmentation markers are applied to actual annotations |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string |
| label required | string |
object (AnnotationBaseMetadata) | |
required | number or object or Array of numbers (Selected3DPoints) |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CSelected3DPoints%3E) | |
| type required | string Value: "semantic-segmentation3d" |
| userId | number Fields to assist big data statistics |
{- "id": "ae71bd1a-7756-4203-b08d-e40614f58f1e",
- "label": "light pole",
- "points": [
- 2572,
- 2573
], - "timeSeries": {
- "0": {
- "type": "appear",
- "value": [
- 2572,
- 2573,
- 2574,
- 2575
]
}, - "1": {
- "type": "disappear"
}
}, - "type": "semantic-segmentation3d"
}| confidence | number current pre-mark3DPolygon Marker Matching Degree |
| confirmed | boolean current pre-mark3DWhether polygon markers are applied to actual labels |
| coordinate | string (InterpolatedCoordinate) Enum: "world" "local" |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string |
| immovable | boolean |
| label required | string |
object (AnnotationBaseMetadata) | |
required | Array of objects (Point3D) [ items ] |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cdef-alias-986760303-252-311-986760303-0-5593%5B%5D%3E) | |
| type required | string Value: "polygon3d" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "d0009254-a3ca-40ce-a5ec-0f1a6540ca95",
- "label": "lane line",
- "points": [
- {
- "x": -5.94146745386932,
- "y": 0.6487346845094346,
- "z": -0.6400509476661682
}, - {
- "x": -5.7823772962612585,
- "y": 10.714616794414477,
- "z": -0.64005094766617
}, - {
- "x": -5.379537741331778,
- "y": 25.696284085979332,
- "z": -0.64005094766617
}, - {
- "x": -4.664824114397961,
- "y": 39.76727362772871,
- "z": -0.64005094766617
}, - {
- "x": -3.7271733911349347,
- "y": 52.603353767868555,
- "z": -0.64005094766617
}, - {
- "x": -2.2931183430941857,
- "y": 66.71864326377883,
- "z": -0.64005094766617
}, - {
- "x": -0.3328501044176954,
- "y": 82.41424858013657,
- "z": -0.64005094766617
}, - {
- "x": 1.751658781465382,
- "y": 96.83281693868969,
- "z": -0.6400509476661682
}, - {
- "x": 4.2190632239259305,
- "y": 111.76542175857026,
- "z": -0.64005094766617
}, - {
- "x": 5.985044679298857,
- "y": 120.34254734452104,
- "z": -0.64005094766617
}
], - "type": "polygon3d"
}| confidence | number |
| confirmed | boolean |
| coordinate | string (InterpolatedCoordinate) Enum: "world" "local" |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string |
| immovable | boolean |
| label required | string |
object (AnnotationBaseMetadata) | |
required | Array of objects (Point3D) [ items ] |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cdef-alias-986760303-252-311-986760303-0-5593%5B%5D%3E) | |
| type required | string Value: "line3d" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "bd57c6a9-e9e4-42f9-b85d-8b95e05048aa",
- "label": "lane line",
- "points": [
- {
- "x": -0.07464693290527892,
- "y": 84.83346274961171,
- "z": -3.1451612903225845
}, - {
- "x": -0.019247454539269473,
- "y": 80.79165035155117,
- "z": -3.1451612903225845
}
], - "type": "line3d"
}| confidence | number |
| confirmed | boolean |
| coordinate | string (InterpolatedCoordinate) Enum: "world" "local" |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
| id required | string |
| immovable | boolean |
| label required | string |
object (AnnotationBaseMetadata) | |
required | object (Point3D) |
| poolId | number Fields to assist big data statistics |
| source | string |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3CPoint3D%3E) | |
| type required | string Value: "point3d" |
| unbindings | Array of strings |
| userId | number Fields to assist big data statistics |
{- "id": "76e90359-ca87-4098-a880-ebcbdfeda444",
- "label": "3Dkey point",
- "point": {
- "x": -1.199233634410771,
- "y": 11.973382579329254,
- "z": -0.5745084881782532
}, - "type": "point3d"
}| consistentAttribute | boolean |
required | InputBoolean (object) or InputNumber (object) or InputText (object) or InputSelect (object) or InputNestedSelect (object) or InputMultipleSelect (object) or InputMultipleText (object) or InputMultipleNestedSelect (object) or InputPosture3D (object) (InputValue) The result data structure of the input items, the input items include, numbers、Text、radio、Multiple choice、Nested radio、Nested multiple selection, etc. |
| key required | string of the entryid, used to distinguish different inputs of the same type。For example, two multiple-choice input items are marked with color and the other with shape. |
| label required | string Enter the name of the item |
| type required | string The type of entry isinput Value: "input" |
{- "key": "input-select-language",
- "label": "language",
- "type": "input",
- "input": {
- "type": "select",
- "value": "English"
}
}| consistentAttribute | boolean |
required | InputBoolean (object) or InputNumber (object) or InputText (object) or InputSelect (object) or InputNestedSelect (object) or InputMultipleSelect (object) or InputMultipleText (object) or InputMultipleNestedSelect (object) or InputPosture3D (object) (InputValue) The result data structure of the input items, the input items include, numbers、Text、radio、Multiple choice、Nested radio、Nested multiple selection, etc. |
| key required | string of the entryid, used to distinguish different inputs of the same type。For example, two multiple-choice input items are marked with color and the other with shape. |
| label required | string Enter the name of the item |
| type required | string The type of entry isinput Value: "input" |
{- "key": "input-text-email",
- "label": "Email",
- "type": "input",
- "input": {
- "type": "text",
- "value": "abc@abc.com"
}
}| consistentAttribute | boolean |
required | InputBoolean (object) or InputNumber (object) or InputText (object) or InputSelect (object) or InputNestedSelect (object) or InputMultipleSelect (object) or InputMultipleText (object) or InputMultipleNestedSelect (object) or InputPosture3D (object) (InputValue) The result data structure of the input items, the input items include, numbers、Text、radio、Multiple choice、Nested radio、Nested multiple selection, etc. |
| key required | string of the entryid, used to distinguish different inputs of the same type。For example, two multiple-choice input items are marked with color and the other with shape. |
| label required | string Enter the name of the item |
| type required | string The type of entry isinput Value: "input" |
{- "key": "multiple-nested-select-[193ca]",
- "label": "object type",
- "type": "input",
- "input": {
- "type": "multiple-nested-select",
- "value": [
- "[\"car\",\"Ferrari\"]",
- "[\"car\",\"Benz\"]",
- "[\"pedestrian\"]",
- "[\"car\",\"public\"]"
]
}
}| confidence | number Current prescale entry-boolean match |
| confirmed | boolean Current prescale entry-Whether the boolean value is applied to the actual dimension |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cboolean%3E) | |
| type required | string input-Boolean values are of typeboolean Value: "boolean" |
| userId | number Fields to assist big data statistics |
| value | boolean or null input-The saved data type of a boolean value is boolean, i.e.true/false |
{- "type": "boolean",
- "value": true
}| confidence | number Current prescale entry-Numerical match |
| confirmed | boolean Current prescale entry-Whether the value is applied to the actual dimension |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cnumber%3E) | |
| type required | string input-The type of the value isnumber Value: "number" |
| userId | number Fields to assist big data statistics |
| value | number or null input-The save data type of the numeric value is number |
{- "type": "number",
- "value": "1"
}| confidence | number Current prescale entry-text match |
| confirmed | boolean Current prescale entry-Whether the text is applied to the actual callout |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%3E) | |
| type required | string input-The type of text istext Value: "text" |
| userId | number Fields to assist big data statistics |
| value | string or null input-The save data type for text isstring, the string |
{- "type": "text",
- "value": "abc@abc.com"
}| confidence | number Current prescale entry-Nested radio match |
| confirmed | boolean Current prescale entry-Whether nested radios are applied to actual labels |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%3E) | |
| type required | string input-The type of nested radio isselect Value: "select" |
| userId | number Fields to assist big data statistics |
| value | string or null input-The save data type of the radio isstring, the string |
{- "type": "select",
- "value": "English"
}| confidence | number Current prescale entry-Nested match |
| confirmed | boolean Current prescale entry-Whether nesting is applied to actual dimensions |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%5B%5D%3E) | |
| type required | string input-The type of nested radio isnested-select Value: "nested-select" |
| userId | number Fields to assist big data statistics |
Array of strings or null input-The save data type of the nested radio isstring array, an array of strings |
{- "type": "nested-select",
- "value": [
- "food",
- "Hamburger",
- "KFC"
]
}| confidence | number Current prescale entry-Multiple choice match |
| confirmed | boolean Current prescale entry-Whether multiple selections are applied to actual labels |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%5B%5D%3E) | |
| type required | string input-The type of multiple selection ismultiple-select Value: "multiple-select" |
| userId | number Fields to assist big data statistics |
Array of strings or null input-The save data type for multiple selection isstring array, an array of strings |
{- "type": "multiple-select",
- "value": [
- "中文",
- "English",
- "French"
]
}| confidence | number Current prescale entry-Tag pattern matching degree |
| confirmed | boolean Current prescale entry-Whether the label mode is applied to the actual label |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%5B%5D%3E) | |
| type required | string input-The type of label pattern ismultiple-text Value: "multiple-text" |
| userId | number Fields to assist big data statistics |
Array of strings or null input-The saved data type of the label pattern isstring array, an array of strings |
{- "type": "multiple-text",
- "value": [
- "fruit",
- "Red",
- "round"
]
}| confidence | number Current prescale entry-Nested Multiple Choice Matching Degree |
| confirmed | boolean Current prescale entry-Whether nested multi-select applies to actual labels |
| hintConfidence | string (HintConfidence) Enum: "High" "Medium" "Low" |
| hintStatus | string (HintStatus) Enum: "Unconfirmed" "Accepted" "Modified" "Rejected" "Draft" "Frozen" "Compared" |
object (AnnotationBaseMetadata) | |
| poolId | number Fields to assist big data statistics |
| teamId | number Fields to assist big data statistics |
object (TimeSeries%3Cstring%5B%5D%3E) | |
| type required | string input-The type of nested multiple selection ismultiple-nested-select Value: "multiple-nested-select" |
| userId | number Fields to assist big data statistics |
Array of strings or null input-The save data type for nested multi-select isstring array, an array of strings |
{- "type": "multiple-nested-select",
- "value": [
- "[\"car\",\"Ferrari\"]",
- "[\"car\",\"Benz\"]",
- "[\"pedestrian\"]",
- "[\"car\",\"public\"]"
]
}| key required | string Action items of parent-child structureid, used to distinguish the operation items of different parent-child structures of the same type。such as twoBox2d + inputSelectThe parent-child structure action items of the |
| label required | string The name of the operation item of the parent-child structure |
required | Array of objects (SlotChildren) [ items ] A sequence of marked results from the action items of the parent-child structure。Multiple targets can appear in the same task and need to be marked with the action item of the current parent-child structure, such as multiple cars |
| type required | string The type of the action item of the parent-child structure isslotChildren Value: "slotChildren" |
{- "key": "polygon-[82bb6]",
- "label": "shape",
- "type": "slotChildren",
- "slotsChildren": [
- {
- "slot": {
- "id": "a9846732-4a49-4164-8a88-13c8c1371305",
- "type": "polygon",
- "vertices": [
- {
- "x": 416.7184774847461,
- "y": 447.7357059737121
}, - {
- "x": 432.9148408327988,
- "y": 446.11606963890677
}, - {
- "x": 412.5528262157116,
- "y": 595.173508941639
}, - {
- "x": 380.18084406671613,
- "y": 466.0263380524886
}, - {
- "x": 396.53721399462967,
- "y": 455.80360684754265
}
], - "label": "shape"
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "input": {
- "type": "select",
- "value": "pentagon"
}
}
]
}, - {
- "slot": {
- "id": "d966ed57-d3f2-42a0-88e9-62ede54d54bc",
- "type": "polygon",
- "vertices": [
- {
- "x": 393.4088459541643,
- "y": 438.7020552835834
}, - {
- "x": 279.7443089664387,
- "y": 391.7388633545231
}, - {
- "x": 393.0685329691711,
- "y": 450.27269677335187
}
], - "label": "shape"
}, - "children": [
- {
- "key": "select-[70332]",
- "label": "type",
- "type": "input",
- "input": {
- "type": "select",
- "value": "triangle"
}
}
]
}
]
}| key required | string Action items of parent-child structureid, used to distinguish the operation items of different parent-child structures of the same type。such as twoBox2d + inputSelectThe parent-child structure action items of the |
| label required | string The name of the operation item of the parent-child structure |
required | Array of objects (SlotChildren) [ items ] A sequence of marked results from the action items of the parent-child structure。Multiple targets can appear in the same task and need to be marked with the action item of the current parent-child structure, such as multiple cars |
| type required | string The type of the action item of the parent-child structure isslotChildren Value: "slotChildren" |
{- "key": "car",
- "label": "car",
- "type": "slotChildren",
- "slotsChildren": [
- {
- "slot": {
- "id": "b5d8a4bd-25c4-4c5b-9f8a-372ba9c97347",
- "type": "box3d",
- "label": "car",
- "box": [
- -0.0199221597319678,
- -2.0050867278783833,
- 0,
- 0,
- 3.88343578735842,
- -0.03858507813597536,
- 0,
- 0,
- 0,
- 0,
- 1.3722919416427612,
- 0,
- -17.168005986844825,
- -0.49648679929152983,
- -1.2062801718711853,
- 1
]
}, - "children": [
- {
- "key": "box2d-[6ee1e]",
- "label": "map car",
- "type": "slot",
- "slots": [
- {
- "id": "5739f566-6c10-4c2f-bcaa-32a3538b2482",
- "type": "box2d",
- "label": "map car",
- "source": "spherical-backward",
- "plane": {
- "bottomLeft": {
- "x": 1087.2111501795766,
- "y": 398.3280313594934
}, - "bottomRight": {
- "x": 1087.2111501795766,
- "y": 592.6711767704561
}, - "topLeft": {
- "x": 817.0173253664345,
- "y": 398.3280313594934
}, - "topRight": {
- "x": 817.0173253664345,
- "y": 592.6711767704561
}
}
}, - {
- "id": "2d1410ad-b1f5-43c6-802e-7ece665f32c7",
- "type": "box2d",
- "label": "map car",
- "source": "spherical-right-backward",
- "plane": {
- "bottomLeft": {
- "x": 1913.2071069883007,
- "y": 266.15787249041176
}, - "bottomRight": {
- "x": 1913.2071069883007,
- "y": 423.1191407901941
}, - "topLeft": {
- "x": 1733.5277783777763,
- "y": 266.15787249041176
}, - "topRight": {
- "x": 1733.5277783777763,
- "y": 423.1191407901941
}
}
}, - {
- "id": "afd19f67-925e-42f7-a225-0ce6cac878eb",
- "type": "box2d",
- "label": "map car",
- "source": "spherical-left-backward",
- "plane": {
- "bottomLeft": {
- "x": 184.4602053207725,
- "y": 209.1457347311532
}, - "bottomRight": {
- "x": 184.4602053207725,
- "y": 371.22364924660303
}, - "topLeft": {
- "x": 0.2333208842314889,
- "y": 209.1457347311532
}, - "topRight": {
- "x": 0.2333208842314889,
- "y": 371.22364924660303
}
}
}
]
}
]
}
]
}| key required | string Action items of parent-child structureid, used to distinguish the operation items of different parent-child structures of the same type。such as twoBox2d + inputSelectThe parent-child structure action items of the |
| label required | string The name of the operation item of the parent-child structure |
required | Array of objects (SlotChildren) [ items ] A sequence of marked results from the action items of the parent-child structure。Multiple targets can appear in the same task and need to be marked with the action item of the current parent-child structure, such as multiple cars |
| type required | string The type of the action item of the parent-child structure isslotChildren Value: "slotChildren" |
{- "key": "polygon-[0c83e]",
- "type": "slotChildren",
- "label": "polygon box+Transcribe",
- "slotsChildren": [
- {
- "slot": {
- "id": "51084cc8-1dbf-457a-8917-cc72a1d89fb1",
- "type": "polygon",
- "label": "polygon box+Transcribe",
- "vertices": [
- {
- "x": 1280.7186001971354,
- "y": 1913.849754023627
}, - {
- "x": 3036.5627332985937,
- "y": 1261.3648778397867
}, - {
- "x": 2944.9215990031107,
- "y": 1056.0887370179044
}, - {
- "x": 2790.964493386699,
- "y": 858.1438869396605
}, - {
- "x": 1335.7032807744254,
- "y": 1701.2423224581062
}, - {
- "x": 1379.6910252362572,
- "y": 1880.858945677253
}
]
}, - "children": [
- {
- "key": "text-[e5835]",
- "type": "input",
- "input": {
- "type": "text",
- "value": "UNA BUONA SPESA È ANCHE MANTENERE LE DISTANZE"
}, - "label": "Please enter the transcription"
}, - {
- "key": "select-[627c8]",
- "type": "input",
- "input": {
- "type": "select",
- "value": "Italian horizontal"
}, - "label": "Attributes"
}, - {
- "key": "select-[4b176]",
- "type": "input",
- "input": {
- "type": "select",
- "value": "“18”"
}, - "label": "The location of the lower boundary point"
}
]
}, - {
- "slot": {
- "id": "f6ec27a8-c722-42b8-8968-2b32b30ebee6",
- "type": "polygon",
- "label": "polygon box+Transcribe",
- "vertices": [
- {
- "x": 1901.2074316476771,
- "y": 2309.5505985455475
}, - {
- "x": 2009.780966811051,
- "y": 2302.3434816635345
}, - {
- "x": 2525.106723207308,
- "y": 2269.984862710364
}, - {
- "x": 2536.1868972347643,
- "y": 2417.5068883702193
}, - {
- "x": 2053.1397594005916,
- "y": 2447.722850953062
}, - {
- "x": 1913.3525560261196,
- "y": 2458.3154735747667
}
]
}, - "children": [
- {
- "key": "text-[e5835]",
- "type": "input",
- "input": {
- "type": "text",
- "value": "LA COOP SEI TU."
}, - "label": "Please enter the transcription"
}, - {
- "key": "select-[627c8]",
- "type": "input",
- "input": {
- "type": "select",
- "value": "Italian horizontal"
}, - "label": "Attributes"
}, - {
- "key": "select-[4b176]",
- "type": "input",
- "input": {
- "type": "select",
- "value": "“4”"
}, - "label": "The location of the lower boundary point"
}
]
}
]
}Input methods supported by the stand-alone annotation tool:
1. URL Hash pass by value
2. jsonfile address
Array of objects (ProjectAlgorithm) [ items ] Algorithm assistance | |
| callbackURL | string The address for submitting the annotation results |
required | object or object |
object (TaskResult) Current task export results |
{- "taskParams": {
- "type": "include",
- "value": {
- "version": "1.0.0",
- "record": {
- "attachmentType": "TEXT",
- "metadata": {
- "title": "Shanxi, Technology helps cut off the hand of program corruption"
}, - "extraInfoUrls": [
- "<a href=\"https://www.baidu.com\">Baidu</a>",
- "<a href=\"https://www.baidu.com\">Google</a>"
]
}, - "operators": [
- {
- "key": "anchor",
- "type": "anchor",
- "label": "Chapter labeling"
}, - {
- "key": "input-text-title",
- "label": "title",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "text",
- "default": "default title"
}
}, - {
- "key": "input-text-EmailbeltRegexverify",
- "label": "EmailbeltRegexverify",
- "type": "input",
- "inputOption": {
- "required": true
}, - "metadata": {
- "hint": "Please enter email address"
}, - "inputSpecification": {
- "type": "text",
- "regex": "^(([^<>()\\[\\]\\\\.,;:\\s@\"]+(\\.[^<>()\\[\\]\\\\.,;:\\s@\"]+)*)|(\".+\"))@((\\[[0-9]{1,3}\\.[0-9]{1,3}\\.[0-9]{1,3}\\.[0-9]{1,3}\\])|(([a-zA-Z\\-0-9]+\\.)+[a-zA-Z]{2,}))$"
}
}, - {
- "key": "input-text-input length validation",
- "label": "input length validation",
- "type": "input",
- "metadata": {
- "hint": "please enter2-5word name"
}, - "inputSpecification": {
- "type": "text",
- "minLength": 2,
- "maxLength": 4
}
}, - {
- "key": "slot-text-Text Annotation Test",
- "label": "Text Annotation Test",
- "type": "slot",
- "slotSpecification": {
- "type": "text"
}
}, - {
- "key": "slot-text-text annotationB",
- "label": "text annotationB",
- "type": "slot",
- "slotSpecification": {
- "type": "text"
}
}, - {
- "key": "slot-text-text annotationC",
- "label": "text annotationC",
- "type": "slot",
- "slotSpecification": {
- "type": "text"
}
}, - {
- "key": "slotChildren-text-SlotAndChildren",
- "label": "Slot and Children",
- "type": "slotChildren",
- "slotSpecification": {
- "type": "text"
}, - "children": [
- {
- "key": "input-text-nested form",
- "label": "nested form",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "text"
}
}, - {
- "key": "input-number-digital input",
- "label": "digital input",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "number"
}
}, - {
- "key": "input-boolean-Boolean",
- "label": "Boolean",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "boolean",
- "default": true
}, - "metadata": {
- "hint": "test"
}
}, - {
- "key": "slotChildren-text-SlotAndChildren",
- "label": "Slot and Children",
- "type": "slotChildren",
- "slotSpecification": {
- "type": "text"
}, - "children": [
- {
- "key": "input-number-digital input2",
- "label": "digital input",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "number"
}
}
]
}
]
}, - {
- "key": "input-select-language",
- "label": "language",
- "type": "input",
- "metadata": {
- "hint": "Test"
}, - "inputSpecification": {
- "type": "select",
- "items": [
- "中文",
- "English",
- "French"
]
}
}, - {
- "key": "input-nested-select-nested selection",
- "label": "nested selection",
- "type": "input",
- "inputSpecification": {
- "type": "nested-select",
- "items": [
- {
- "label": "food",
- "value": "food",
- "children": [
- {
- "label": "bread",
- "value": "bread"
}, - {
- "label": "Hamburger",
- "value": "Bag",
- "children": [
- {
- "label": "KFC",
- "value": "KFC"
}, - {
- "label": "McDonald",
- "value": "McDonald"
}
]
}
]
}, - {
- "label": "for drink",
- "value": "for drink"
}
]
}
}, - {
- "key": "input-multiple-select-Multiple choice languages",
- "label": "Multiple choice languages",
- "type": "input",
- "inputSpecification": {
- "type": "multiple-select",
- "items": [
- "中文",
- "English",
- "French"
]
}
}, - {
- "key": "anchor-Label2",
- "label": "Label2",
- "type": "anchor"
}, - {
- "key": "childrenOnly-text-Group",
- "label": "Group",
- "type": "childrenOnly",
- "children": [
- {
- "key": "input-text-nested form2",
- "label": "nested form",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "text"
}
}, - {
- "key": "input-number-digital input2",
- "label": "digital input",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "number"
}
}, - {
- "key": "input-boolean-Boolean2",
- "label": "Boolean",
- "type": "input",
- "inputOption": {
- "required": true
}, - "inputSpecification": {
- "type": "boolean",
- "default": true
}, - "metadata": {
- "hint": "test"
}
}
]
}
]
}
}, - "taskResult": {
- "notes": [ ],
- "issues": [ ],
- "annotations": [
- {
- "key": "anchor",
- "label": "Chapter labeling",
- "type": "anchor"
}, - {
- "key": "input-text-title",
- "label": "title",
- "type": "input",
- "input": {
- "type": "text",
- "value": "default title"
}
}, - {
- "key": "input-text-EmailbeltRegexverify",
- "label": "EmailbeltRegexverify",
- "type": "input",
- "input": {
- "type": "text"
}
}, - {
- "key": "input-text-input length validation",
- "label": "input length validation",
- "type": "input",
- "input": {
- "type": "text"
}
}, - {
- "key": "slot-text-Text Annotation Test",
- "label": "Text Annotation Test",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "slot-text-text annotationB",
- "label": "text annotationB",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "slot-text-text annotationC",
- "label": "text annotationC",
- "type": "slot",
- "slots": [ ]
}, - {
- "key": "slotChildren-text-SlotAndChildren",
- "label": "Slot and Children",
- "type": "slotChildren",
- "slotsChildren": [ ]
}, - {
- "key": "input-select-language",
- "label": "language",
- "type": "input",
- "input": {
- "type": "select"
}
}, - {
- "key": "input-nested-select-nested selection",
- "label": "nested selection",
- "type": "input",
- "input": {
- "type": "nested-select"
}
}, - {
- "key": "input-multiple-select-Multiple choice languages",
- "label": "Multiple choice languages",
- "type": "input",
- "input": {
- "type": "multiple-select"
}
}, - {
- "key": "anchor-Label2",
- "label": "Label2",
- "type": "anchor"
}, - {
- "key": "childrenOnly-text-Group",
- "label": "Group",
- "type": "childrenOnly",
- "children": [
- {
- "key": "input-text-nested form2",
- "label": "nested form",
- "type": "input",
- "input": {
- "type": "text"
}
}, - {
- "key": "input-number-digital input2",
- "label": "digital input",
- "type": "input",
- "input": {
- "type": "number"
}
}, - {
- "key": "input-boolean-Boolean2",
- "label": "Boolean",
- "type": "input",
- "input": {
- "type": "boolean",
- "value": true
}
}
]
}
]
}
}